html5
通信协议
harmonyos
ArrayDeque
ratio-test
.md预览
模拟退火算法
产品运营
Molecular
pdf
人手检测
OpenAI
java-ee
QSS
表示范围
DDD领域驱动设计
分支优化
UI开发
webdav
表面检测
传感器
2024/4/11 15:52:20
自动驾驶 | 传感器融合–自动驾驶的关键技术
传感器融合 为了使车辆能够自动驾驶,必须借助传感器来感知周围环境:摄像头、雷达、超声波和LiDAR传感器等。 传感器如何实现自动驾驶 大众甲壳虫看上去很美,但它并不能识别周围的环境。对于汽车实现自动驾驶来说,感知环境就像人类…

传感器 | 密度测量系列:3.MEMS技术
简介
本节以TrueDyne sensor公司为例,介绍了什么是MEMS传感器技术,以及他们的MEMS传感器技术的积累过程。MEMS传感器的技术核心,是硅谐振测量通道,与传统的谐振器技术相比,MEMS传感器具有许多的优点,例如&…

地磁系统相对于机器视觉的优势
目前市面上很多路边停车采用视频桩或者高位视频的方式采集车辆信息,然后再计时计费,相比于地磁系统,采用视频的方式可以识别车辆信息,还可以观察车辆的状况,有些企业声称视频桩或者高位视频可以完全取代地磁系统成为新…

医药电子 | 三轴加速度传感器的类型、原理、特点和应用
作者:虹科医药电子-李金涛
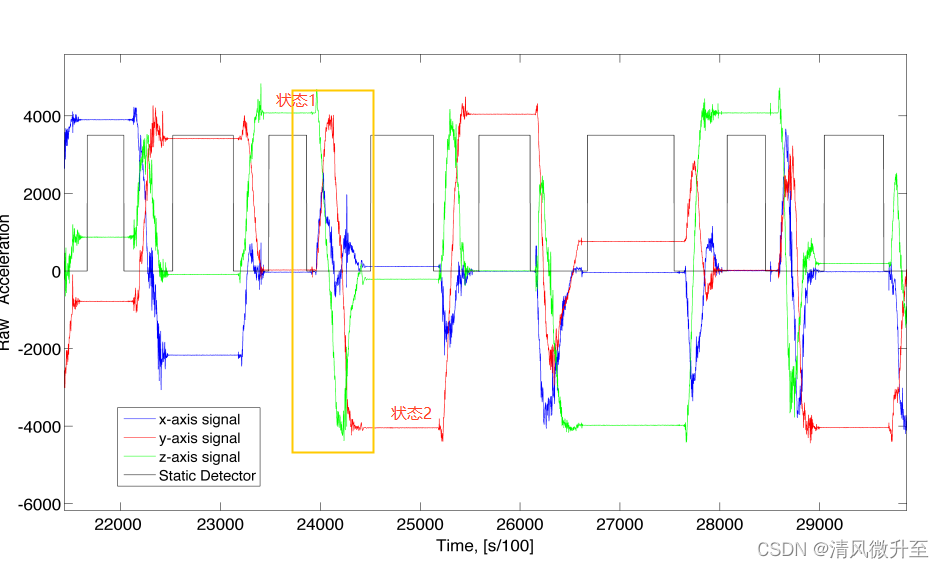
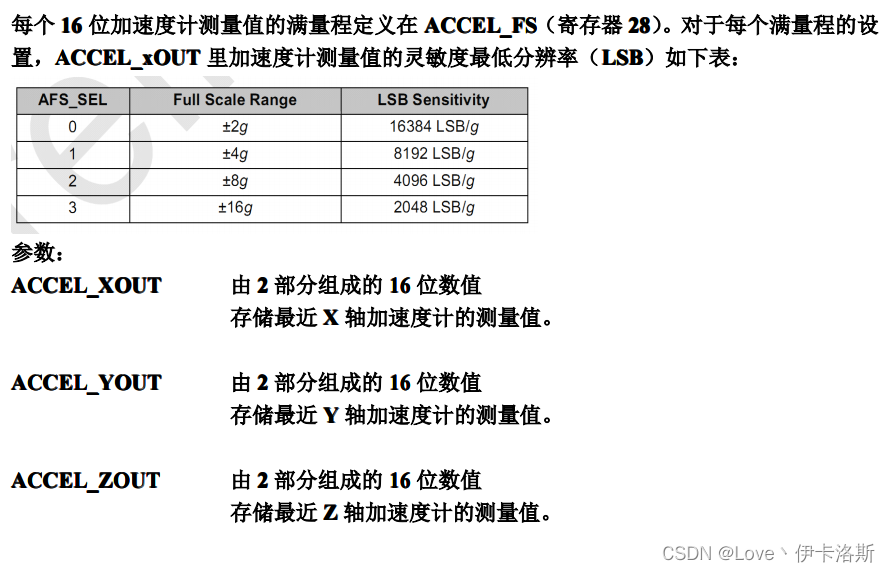
三轴加速度传感器是加速度传感器中用来测量空间加速度的传感器,即测量物体在空间中速度变化的快慢,三轴加速度传感器与单轴、两轴加速度传感器在测量原理上没有差别,他们的主要差别在于测量的维度不同&…

常用物联网传感器(LED/继电器和水泵/按钮/温湿度/舵机/电机/超声波/tm1638)
一、LED 长引脚是正极,短引脚是负极。LED灯的正极接板卡GPIO引脚,负极接GND。控制参考板卡LED方式。
树莓派(红绿LED灯按钮)示例代码:
https://codechina.csdn.net/-/snippets/181二、继电器模块&水泵 三、舵机模…
ESP32设备驱动-BMP180气压传感器驱动
BMP180气压传感器驱动
1、BMP180介绍
BMP180 是 Bosch Sensortec 的新型数字气压传感器,具有非常高的性能,可应用于智能手机、平板电脑和运动设备等高级移动设备。它沿用 BMP085 并带来了许多改进,如更小的 尺寸和数字接口的扩展。
BMP180的功耗超低,低至 3 μ \mu μA。…
ESP8266 网络服务器仪表显示传感器读数
了解如何使用 ESP8266 NodeMCU 构建网络服务器以在仪表中显示传感器读数。 例如,我们将以两种不同的仪表显示来自 BME280 传感器的温度和湿度:线性和径向。
概述
该项目将使用 ESP8266 构建一个 Web 服务器,该服务器显示来自 BME280 传感器…
电子电路设计基本概念100问(五)【学习目标:原理图、PCB、阻抗设计、电子设计基本原则、基本原器件等】
笔者电子信息专业硕士毕业,获得过多次电子设计大赛、大学生智能车、数学建模国奖,现就职于南京某半导体芯片公司,从事硬件研发,电路设计研究。对于学电子的小伙伴,深知入门的不易,特开次博客交流分享经验&a…

物联网终端有哪些应用
物联网终端是由外围感知系统,中央处理模块和外部通讯组成,通过传感设备采集数据,如地磁传感器、RFID读卡器、红外感应器,环境传感器等,将这些传感设备的数据通过通信网络传输至中央处理模块进行数据处理和存储。 所以终…

无线地磁相对于地磁传感线圈的优势
地感线圈这一从20世纪中期就被使用的车辆检测设备,正面遭遇了无线地磁的挑战。相对于地感线圈来说,无线地磁传感器在关键的数据采集、施工简便程度都有自己的优势。 无线地磁传感器的优势
地球的磁场在几公里之内基本上是恒定的,但大型的铁磁…
Arduino 和 Raspberry Pi 传感器实践
特点
给出了如何将传感器和执行器与微控制器、Raspberry Pi 和其他控制系统连接起来的实用而广泛的说明,描述了原始信号通过调节阶段、数字化、数据存储和呈现的过程构建了大型工业或科学装置的简化模型,其中包含硬件和其他构建块,包括用于数…
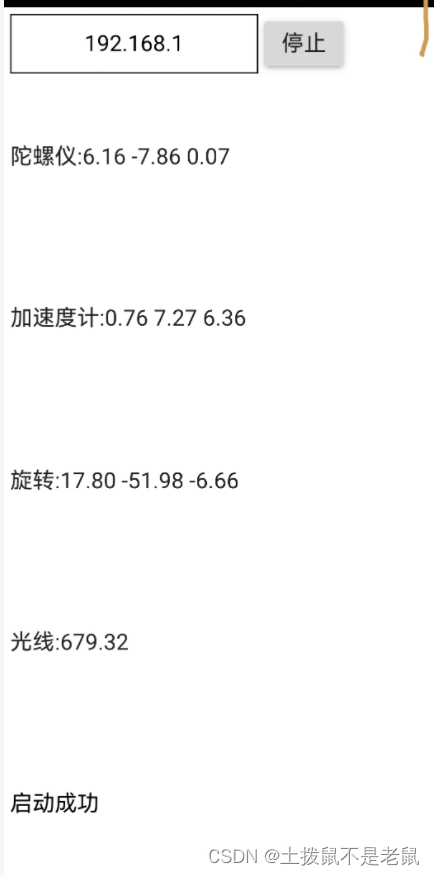
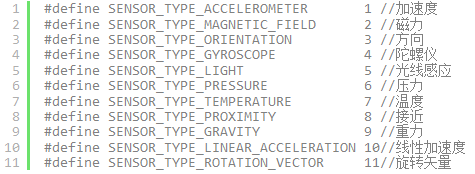
QML android 采集手机传感器数据 并通过udp 发送
利用 qt 开发 安卓 app ,采集手机传感器数据 并通过udp 发送 #ifndef UDPLINK_H
#define UDPLINK_H#include <QObject>
#include <QUdpSocket>
#include <QHostAddress>class UdpLink : public QObject
{Q_OBJECT
public:explicit UdpLink(QObjec…

RDA226数字热释电传感器调试笔记
RDA226数字热释电传感器是一款将传统热释电传感器的敏感元件与信号处理芯片集成化设计,芯片共有6个引脚,可以调节感应灵敏度、输出延时、以及开启/关闭,使用方便。 下面是芯片调试过程的总结。 1、感应灵敏度调节 SENS脚上的电压决定了传感器…

5G时代背景下物联网通信何去何从
物联网技术的原理其实就是在计算机互联网的基础上,利用传感技术、数据通信等技术,构建一个覆盖世界万物的“Internet of Things”。将事物置于此网络中,“物”能够彼此进行“交流”,而无需人的干预。其实质是利用传感技术…
路边停车系统无线地磁车辆传感器
作为路边停车系统的传感设备,无线地磁车辆检测器安装在车位中,埋在地下,通过磁场变化能采集到是否有车,车流量多大。采集好数据后,通过DDA无线传输的方式,发送至网关中继,再传输至后台。可与有关…
指南针的实现代码两种方法,怎么用
这是一篇介绍指南针先进方法的博客,但是事实是不能用,笔者试过了~有兴趣的可以看一下,笔者不再赘言
说一下不能用的原因,是因为这个onSensorChanged(SensorEvent event)方法调用这里出了问题,他不是像想像中的那样&am…

Arduino开发实例-LJ12A3-4-Z/BX 电感式接近传感器驱动
LJ12A3-4-Z/BX 电感式接近传感器驱动 文章目录 LJ12A3-4-Z/BX 电感式接近传感器驱动1、LJ12A3-4-Z/BX 电感式接近传感器介绍2、硬件准备及接线3、代码实现1、LJ12A3-4-Z/BX 电感式接近传感器介绍
接近传感器用于检测附近物体的存在。 LJ12A3-4-Z / BX 传感器有三个引脚,其中两…
STM32基于软件模拟IIC进行AHT21B温湿度采集
STM32基于软件模拟IIC进行AHT21B温湿度采集一、 IIC简介1.1 IIC简介1.2 实现方式1.3 实现方式对比二、 AHT21B简介2.1 简介2.2 产品特点2.3 外观2.4 技术参数2.5 引脚定义三、 工程编写3.1 实验要求3.2 主要代码3.3 烧录3.4 结果展示四、 总结五、 参考资料摘要:通过…
处理点云数据(二):点云与生成前视图
创建点云数据中的前视图
前视图投影
为了将激光雷达传感器的前视图平面化为二维图像,必须将三维空间中的点投影到可以展开的圆柱形表面上,以将其平面化。下面公式见论文Vehicle Detection from 3D Lidar Using Fully Convolutional Network
# h_res …
Arduino开发实例-使用SIM800L GSM模块接收和发送短信
使用SIM800L GSM模块接收和发送短信 文章目录 使用SIM800L GSM模块接收和发送短信1、硬件准备1.1 SIM800L介绍2、硬件接线原理图3、代码实现3.1 AT指令测试3.2 发送短信3.3 接收短信3.4 拨打电话3.5 接听电话在本文中,我们将使用 SIM800L GSM 模块和 Arduino。 SIM800L是一款低…

传感器 | 流体粘度传感器的基础知识与应用
什么是粘度?
通俗的讲,粘度就是表示流体在流动时,流体内部发生内摩擦的物理量,是流体反抗形变的能力。
➀ 粘度的定义
✎ 国标中对粘度的定义【1】:在两个平行平面间受剪切的流体,单位接触表面积上法向…

ESP32设备驱动-PCF8575IO扩展器驱动
PCF8575IO扩展器驱动 文章目录 PCF8575IO扩展器驱动1、PCF8575介绍2、硬件准备3、软件准备4、驱动实现1、PCF8575介绍
PCF8575用于两线双向总线 (I2C) 的 16 位 I/O 扩展器专为 2.5-V 至 5.5-V VCC 操作而设计。
PCF8575 器件通过 I2C 接口 [串行时钟 (SCL)、串行数据 (SDA)]…
Arduino开发实例-NEO-6M GPS模块使用
NEO-6M GPS模块使用 文章目录 NEO-6M GPS模块使用1、硬件准备1.1 NEO-6M GPS模块介绍1.2 硬件接线原理图2、代码实现2.1 GPS数据接收2.2 GPS数据组成2.3 解析GPS数据2.4 在OLED中显示GPS数据本文将展示如何将 NEO-6M GPS 模块与 Arduino 连接。 NEO-6M GPS 模块是一个 GPS 接收…

传感器 | 密度测量系列:1.密度测量的基础知识
简介
本文章将带你深入了解密度测量的基础知识,你将了解到:密度的物理性质,其常用单位,以及什么是标准密度,什么是比密度。此外还介绍了密度的常用测量方法和这些常用测量方法的比较,必须注意的是…

【51单片机】 火焰传感器用法及代码
这里用的是4线,3线的原理也是一样的。 IO口在程序中自定义,下面用的是P3^0
#include<regx51.h>
void main()
{while(1){P20xff; //初始化ledif(P3_00) //传感器检测到火焰信号P20x00; //led全亮}
}接线: …

esp8266连接blinker进行控制
文章目录前言一、按键控制1.APP设置1.代码配置二、数据反馈1.APP配置2.代码配置三、给微信发送消息示例总结前言
在前面已经将Arduino配置esp8266开发环境以及esp8266接入Blinker介绍了以后只是能在手机端看到在线。本文介绍如何给esp8266添加功能。 提示:本篇文章…

单反相机参数之光圈、快门篇
本文导航 开篇:光圈和快门是什么 光圈特性(一):控制进光量 光圈特性(二):控制景深 快门特性(一):控制进光量 快门特性(二)&#x…

单反相机参数之ISO/焦距篇
ISO/焦距是什么 要说什么是ISO还要从传统胶片相机说起,ISO称作为感光度,它是衡量传统相机所使用胶片感光速度的国际统一指标,其反映了胶片感光时的速度(其实是银元素与光线的光化学反应速率)。而对于现在并不使用胶片的…
Android传感器学习总结
1、名词解析:
传感器是把现实中的某种指标以数据的形势传送给开发者 2、使用步骤:
①声明传感器管理者:
private SensorManager sensorManager;
②获取传感器系统服务:
sensorManager (SensorManager) getSystemService(Con…

ESP32设备驱动-74HC595驱动7段数码管
74HC595驱动7段数码管 文章目录 74HC595驱动7段数码管1、74HC595介绍2、硬件准备3、软件准备4、驱动实现所有微控制器都有特定数量的 IO 引脚,但在某些应用中,例如在 7 段显示器中,我们需要的 GPIO 引脚数量超过我们的控制器所能提供的数量。 对于这种需要多个输出引脚但微控…

使用Arduino和TTP223电容式触摸传感器制作触摸检测器
在本篇文章中,我们将TTP223电容式触摸传感器开关与Arduino开发板进行连接,用于设计触摸检测器。使用Arduino和TTP223电容式触摸传感器开关的触摸检测器是一个非常简单的项目,用于通过简单触摸实现开关电路。任何家用电器都可以通过将继电器与…

医药电子 | 温度传感器的类型原理特点和应用
序言
温度是反应物体冷热状态的参数,它与人们的生活密切相关,过高或者过低的温度会给人体带来不适,严重者甚至会威胁到生命。因此,对温度的监测十分重要。古时候人们就已经为检测温度做出了努力,“水瓶”亦可称“冰瓶…
智能插座基础版能否接入Home Assistant智能平台?
声明: 转载自:http://bbs.xiaomi.cn/t-13447480-n7 如题,请问能否给小米智能插座基础版(wifi版)能否开放api接口,目前在用的Home Assistant是一个开源的智能平台,上面支持的智能设备和智能联动场景灵活多样…

Broadlink :智能家居的下一步是人工智能
转载至:http://www.ifanr.com/501002 提及智能家居,我们总会联想种种奇幻的“未来之家”:走进房门,灯光自动激活、电视自动播放、浴室自动烧水、空调自动调节…… 当下的技术实现这些场景并不复杂,问题在于,…
激光雷达学习笔记(三)特征提取
激光雷达获取的信息是和周围物体之间的距离信息,在移动机器人尤其是自主移动机器人领域具有非常广泛的应用,那我们就从移动机器人的自主导航开始聊吧。 移动机器人导航是指移动机器人依靠传感器在特定环境中,按时间最优、路径最短或能耗最低等…
温度传感器的分类及比较
一、常用的工业温度传感器 在飞速发展的新时代,工业中温度传感器变得越来越重要,在工业生产中,温度是测量频度最高的物理参数, 并且可采用各种各样的传感器来进行测量。所有这些传感器均通过检测某种物理特性的变化来推断温度。 可见在工业中…
激光雷达学习笔记(四)定位
机器人定位的目的是为了知道“自己在什么地方”,目前,机器人定位的方法可以分为非自主定位与自 主定位两大类。所谓非自主定位是在定位的过程中机器人需要借助机器人本身以外的装置如:全球定位 系统(GPS)、全局视觉系统等进行定位;…

ESP32设备驱动-ADS1115模数转换器驱动
ADS1115模数转换器驱动 文章目录 ADS1115模数转换器驱动1、ADS1115介绍2、硬件准备3、软件准备4、驱动实现1、ADS1115介绍
ADS1115 器件是一款精密、低功耗、16 位、I2C 兼容的模数转换器 (ADC),采用超小型、无引线、X2QFN-10 和 VSSOP-10 封装。 ADS1115 器件包含一个低漂移…
电赛2020A题心电信号测量比赛代码讲解。 无线运动传感器节点
这次的A题不是很难,直接开始吧 目录按键扫描函数温度处理函数心电显示函数初始化函数就不写上去了,没什么价值。我把所有代码打包了,想下载的点这里: 电赛2020A题心电信号测量比赛代码 具体芯片的详解可以留言,有人看就…
ESP32设备驱动-FreeRTOS多核运行
FreeRTOS多核运行 文章目录 FreeRTOS多核运行1、EPS32双核介绍2、FreeRTOS介绍3、软件准备4、硬件准备5、FreeRTOS多核使用5.1 如何查询程序在哪个CPU中运行5.2 在指定CPU中创建任务5.3 完整示例在本文中,我们将介绍如何使用 FreeRTOS 和 Arduino IDE 使用 ESP32 双核。 ESP32…
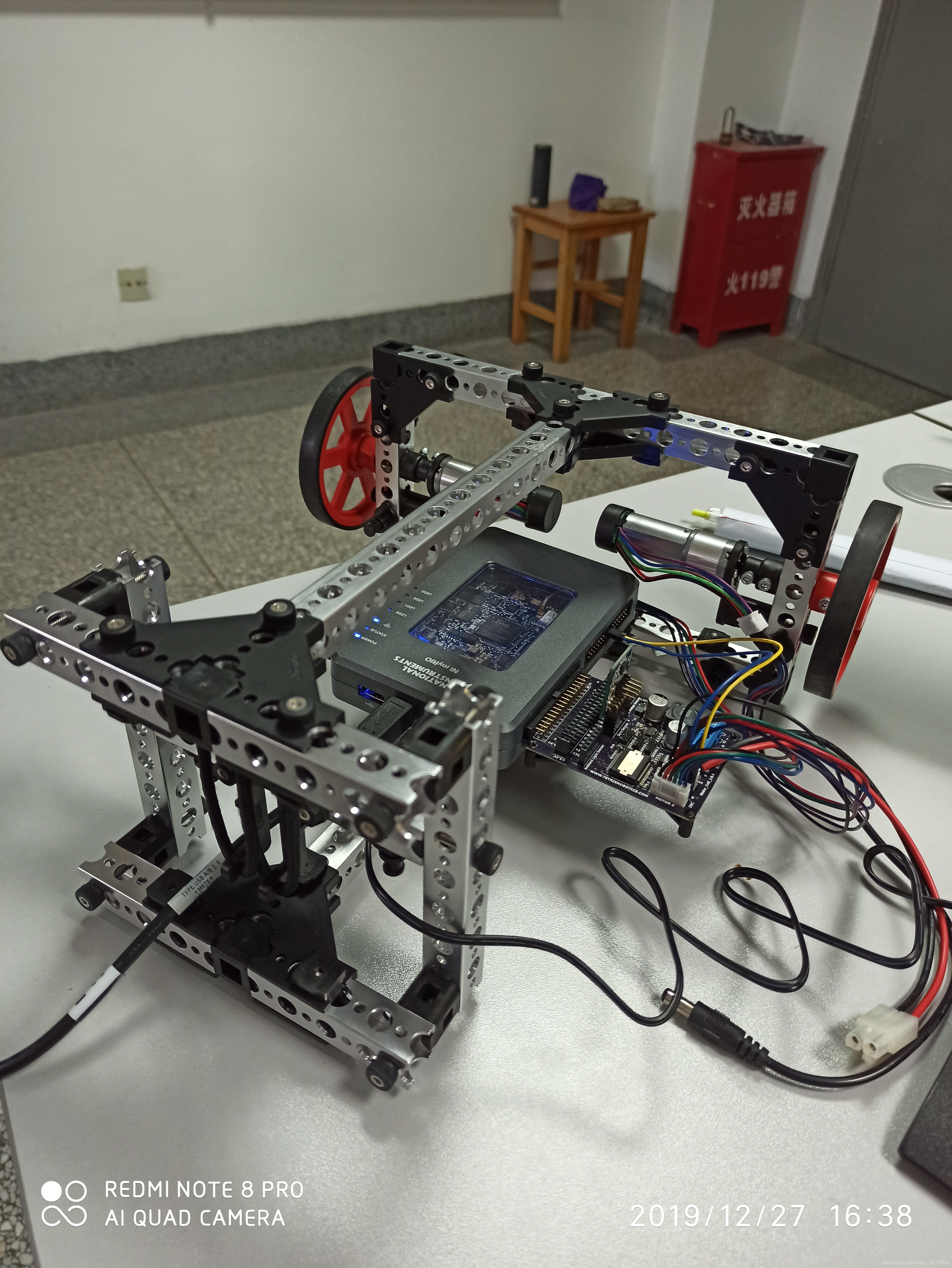
基于 NI myRIO 的平衡车设计
摘要
本文设计了以 NI myRIO 作为核心控制器,用 LabVIEW 编程语言开发的两轮自平衡小车。根据加速度传感器的测量数据以及编码器的数据,通过PID算法,利用NI myRIO调节PWM从而获得平衡车稳定的姿态,并结合系统本身设计了串联PID 控…
环境参数智能监测站设计(说明书篇)
摘要
环境参数监控系统,价格高,功耗较大,移动性较差,需要较高的硬件与软件支持,数据采集端与监控端需要通过很多很长的通信线进行连接,从而使得系统稳定性不高,对于多参数多点监控的场所&#…

ESP32设备驱动-MMA8452加速度计驱动
MMA8452加速度计驱动 文章目录 MMA8452加速度计驱动2、硬件准备3、软件准备4、驱动实现MMA8452Q 是一款智能、低功耗、三轴、电容式微加工加速度计,具有 12 位分辨率。 该加速度计具有嵌入式功能,具有灵活的用户可编程选项,可配置为两个中断引脚。 嵌入式中断功能可实现整体…
【Android入门到项目实战-- 9.4】—— 方向传感器的详细使用教程
目录 一、基础知识
二、实战使用 一、基础知识 Android的方向传感器,返回三轴的角度数据,方向数据的单位是角度。 提供三个数据:azimuth、pitch和roll。 azimuth:方位,返回水平时磁北极和Y轴的夹角,范围是…
百度智能车竞赛丝绸之路1——智能车设计与编程实现控制
百度智能车竞赛丝绸之路1——智能车设计与编程实现控制 百度智能车竞赛丝绸之路2——手柄控制
一、项目简介
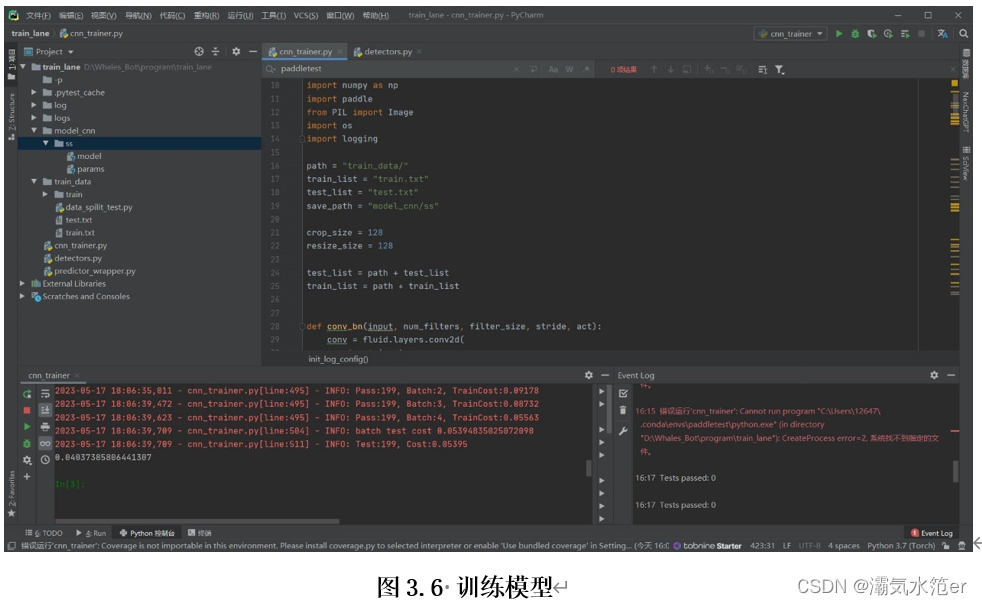
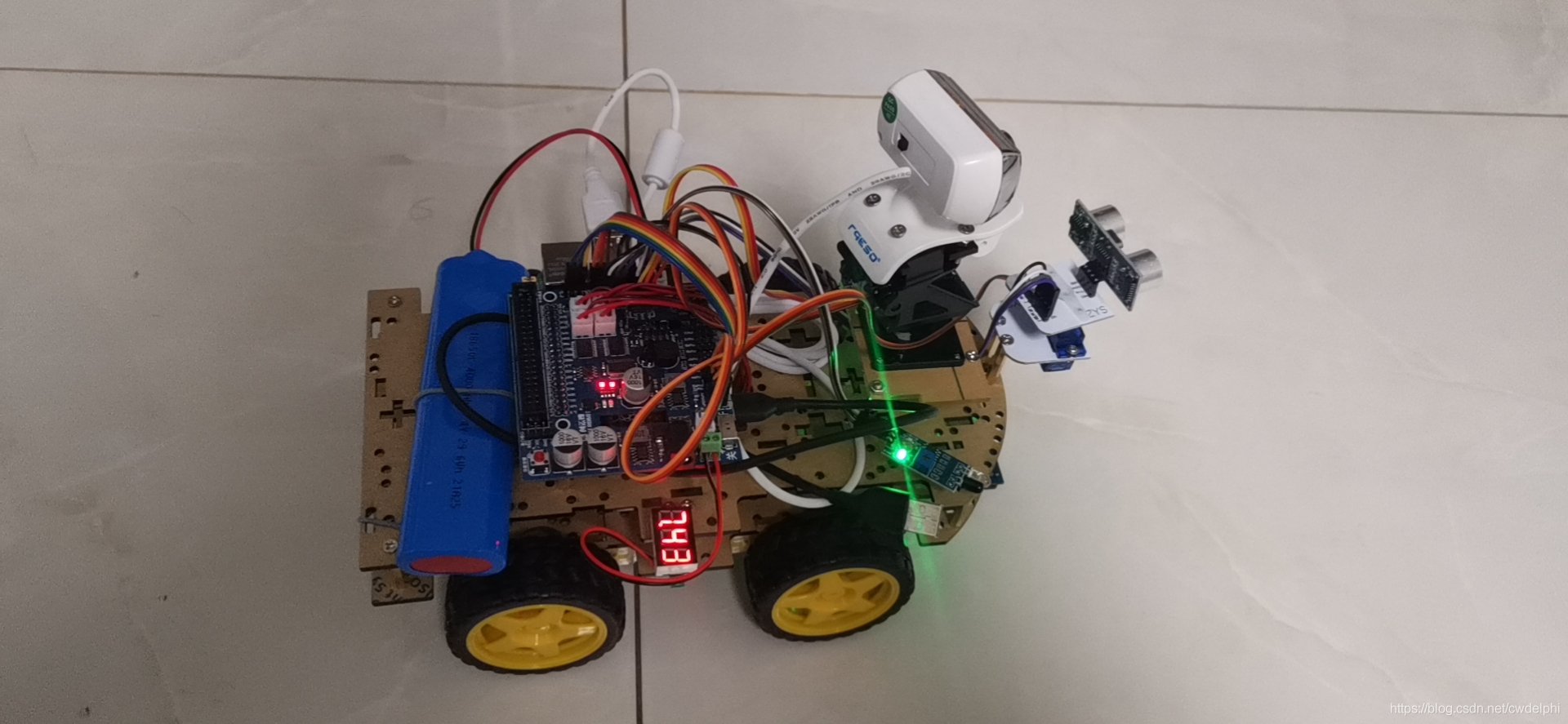
本项目现已基于鲸鱼机器人开发套件对其整体外形进行设计,并且对应于实习内容——以“丝绸之路”为题,对机器人各个功能与机器人结构部分进行相…
华人科学家发现第四种传热方式!真空声子传热将改写物理教科书
早在上中学时,我们就知道传热一共有三种方式,热传导、热对流、热辐射。如今,这一教科书上的知识要被改写了。
近期,一篇发表在《自然》杂志上的论文让不少传热学、物理学、量子力学等领域的科学家们兴奋不已。美国加州大学伯克利…

ESP32设备驱动-BMP388气压传感器驱动
BMP388气压传感器驱动 文章目录 BMP388气压传感器驱动1、BMP388介绍2、硬件准备3、软件准备4、驱动实现1、BMP388介绍
BMP388 是一款非常小巧、低功耗和低噪声的 24 位绝对气压传感器。 它可以实现精确的高度跟踪,特别适合无人机应用。 BMP388 在 0-65C 之间的同类最佳 TCO,…

单片机电子血压计原理与设计
本次设计采用的是示波器法: 其信号采集端的原理图如下: 本次设计使用的血压计传感器型号:MPS-3117-006GC 本次使用的匀速放气阀型号:DS-JJE-01 8-10MMHG,听说可以用线性电磁阀,可控制放气速度。 另外使用常…

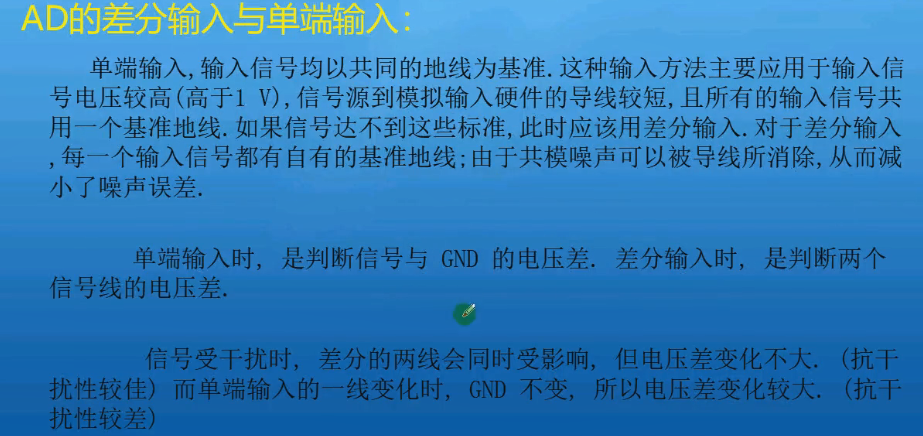
STM32之ADC的理解及运用
文章目录前言一、ADC的输入通道与模式1、输入通道2、模式1)独立模式单通道采集2)独立模式多通道采集3)双重ADC模式采集二、ADC的触发方式三、编程要点四、资源连接前言 ADC在项目中使用运用的很广泛,有ADC自然也有DAC,…

环境参数智能监测站设计(软件篇)
环境参数智能监测站设计(软件篇)
系统总体设计
本系统具有对环境的温度、湿度、光照、空气质量、土壤水分、雨情的检测和控制等功能。系统运用STM32F103C8T6作为最小系统的中央处理器。整个系统主要从硬件电路设计和软件程序设计两部分来实现。可以将环…
温度传感器的一些比较
热敏电阻温度范围窄;
热电偶线性度不高,容易零漂;
RTD铂电阻线性度好,温度范围中低等;
IC温度传感器温度分为数字和模拟的,不过可测温度范围小,最高150。
陀螺仪传感器与方向传感器的区别
陀螺仪传感器得到的是三个方向的旋转角速度,静止时三个角速度都为零。 如果你想来获取设备的相对的精准的旋转角度,(注意不是绝对的旋转角度),此时可以用陀螺仪传感器,比如说,在模拟游戏中人物…

AD18绘制AHT20原理图及PCB电路设计
文章目录前言AHT20芯片简介AHT20 性能参数AHT20 接口AHT20 封装AD18中AHT20 原理图绘制及封装AD18中AHT20 原理图绘制AD18中AHT20 封装PCB绘制添加AHT20 到STM32最小系统原理图中绘制PCB前言 本文介绍了AHT20 芯片,并且绘制了AHT20 的原理图,对AHT20 进行…

Arduino不同测距传感器对于较小物体测距效果【学习记录】
文章目录前言一、HC-SR04超声波测距模块二、TOF200F红外激光测距模块三、SP-TOF可见激光测距模块总结前言
由于最近的设计项目有对于较小物体车测距需求,所以对三种类型的测距模块进行测试,以下测试只作为在校小白的学习记录。 测试模块: (1…
树莓派智能小车的购买选择、硬件原理、程序编写全套教程
一、小车器件购买选型
教程里是购买的淘宝上集成好的小车器件。另外自己也买了一些散件配置了一辆自己的小车。 https://detail.tmall.com/item.htm?id608554421638&spma1z09.2.0.0.7e012e8d3NEMy0&_u12kf16b6b4b
组件包括: 1、小车底板(2个…
机器人SLAM与自主导航(一)——理论基础
机器人SLAM与自主导航(一)——理论基础 目录总述1、激光雷达2、摄像头3、RGB-D摄像头总述
SLAM可以描述为:机器人在未知的环境中从一个未知位置开始移动,移动过程中根据位置估计和地图进行自身定位,同时建造增量式地图…
百度智能车竞赛丝绸之路2——手柄控制
百度智能车竞赛丝绸之路1——智能车设计与编程实现控制 百度智能车竞赛丝绸之路2——手柄控制
一、机器人设计 二、实现原理
本教程使用Python的Serial库和Struct二进制数据解析库去实现Xbox手柄百度大脑学习开发板(上位机)和机器人控制器(…
传感器:探索Android中的传感器功能与使用
传感器:探索Android中的传感器功能与使用 一、传感器介绍1.1 Android 平台三大类传感器1.2 Android 平台支持的传感器1.3 传感器框架 二、传感器的使用2.1 识别传感器和传感器特性2.2 针对不同制造商的传感器或传感器的不同版本优化2.3 监控传感器事件2.4 处理不同的…
ESP32综合实例-传感数据记录到SD卡
传感数据记录到SD卡 文章目录 传感数据记录到SD卡1、应用程序介绍2、DS18B20介绍3、软件准备4、硬件准备5、代码实现在本文中,我们将介绍如何使用 ESP32 将 DS18B20 温度传感器读数连同时间戳记录到 MicroSD 卡中。 此外,当前日期和时间也将与每个温度传感器读数一起记录。 我…
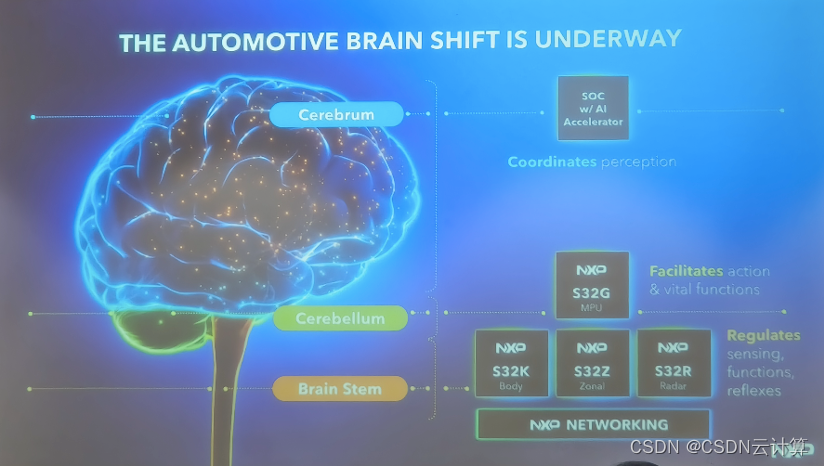
智能驾驶、智能家居、智能工业中的 AI 关键基础设施,半导体厂商恩智浦的角色是什么?
我们来看一条七年前的真实新闻报道,2016 年《福布斯》在报道中提到“2020 年会有 1000 万台的自动驾驶汽车”。然而 2023 年的现在,真正实现 L4 级别自动驾驶的汽车,仍然远远没有达到这个预测的数量。 另一边,数据显示,…

循迹智能小车 循黑线 智能小车 红外循迹传感器 单片机
循迹智能小车 循黑线 文章目录循迹智能小车 循黑线硬件菜单硬件使用硬件组装程序设计前的理解程序代码个人原创博客:
点我浏览硬件菜单 单片机型号:STC16F40K128 4路红外循迹模块 小车底盘套件(一个底盘、两个TT马达、两个轮胎)…
4-20mA传感器的由来
工业上普通使用的压力传感器输出值都是4-20mA的、这是常规的传感器输
出数值、但为什么会是4-20mA而不是其它的数值输出呢?
众所周知:采用电流信号的原因是不容易受干扰、并且电流源内阻无穷大,
导线电阻串联在回路中不影响精度ÿ…
物联网导论-传感器技术
信息技术三大支柱: 传感器、通信技术、计算机技术
传感器定义: 能够感受规定的被测量并按照一定规律转换成可用输出信号的期间和装置。 组成:
敏感元件:直接感受被测量的转换元件:将被测量转换成电参量(如…
【国产MCU】-CH32V307-通用DMA控制器及使用
通用DMA控制器及使用 文章目录 通用DMA控制器及使用1、通用DMA控制器介绍2、DMA驱动API介绍3、DMA使用实例直接存储器访问控制器(DMA)提供在外设和存储器之间或存储器和存储器之间的高速数据传输方式,无须CPU 干预,数据可以通过DMA 快速地移动,以节省CPU 的资源来做其他操…

Arduino开发实例-手指心率传感器模块
手指心率传感器模块 文章目录 手指心率传感器模块1、手指心率传感器介绍2、硬件准备及接线3、代码实现1、手指心率传感器介绍
本次使用的心率传感器模块是为教育和娱乐目的而设计的,通过手指检测心血管脉搏波。 它使用 PPG (HRM-2511E) 探头进行数据传输。 该传感器使用红外线…
【AI视野·今日Robot 机器人论文速览 第六十四期】Fri, 27 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 27 Oct 2023 Totally 27 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
6-DoF Stability Field via Diffusion Models Authors Takuma Yoneda, Tianchong Jiang, Gregory Shakhnarovich, Matthew R. …
ESP32设备驱动-数据持久化到Flash
数据持久化到Flash 文章目录 数据持久化到Flash1、Preferences库介绍2、软件准备3、硬件准备4、代码实现4.1 初始化NVS Flash4.2 读写Key/Value对4.3 保存/读取网络凭据4.4 复位后记住最后的 GPIO 状态在本文中,我们将介绍如何使用 Preferences库将数据存储到 ESP32 的Flash中…
基于I2C硬件协议的AHT20温湿度传感器的数据采集
基于I2C硬件协议的AHT20温湿度传感器的数据采集一、I2C协议简介1、I2C物理层2、I2C协议层二、软件I2C和硬件I2C(1)软件I2C(2)硬件I2C三、AHT20温湿度传感器的数据采集四、参考资料一、I2C协议简介 2C 通讯协议(Inter-I…

人人可拥有? 一部手机即可生成真实的数字化身 #Meta 离元宇宙更近了吗?
哇塞!能问下这个虚拟人是用啥软件做出来的? unreal 的metahuman 吗?还是 ready player me?还是其它酷炫的软件?###用 ready player me 做的,在他基础上修改。人物的肢体动作是用的 mix,还是直接在 unity 里…

基于NI myRIO 的智能家居设计
摘要
本文设计了以 NI myRIO 作为核心控制器,用 LabVIEW 编程语言开发的智能家居系统。此监控系统包括温度采集单元、光照采集单元、烟雾浓度采集单元、人体红外检测采集单元、红外采集单元,分别通过信号调理电路与NI myRIO 相连,控制器输出…

环境参数智能监测站设计(硬件篇)
环境参数智能监测站设计(硬件篇)
一、设计内容及技术要求:
1、任务描述
设计并制作一个智能型环境参数监测站,实现对站点温湿度、土壤水分、空气质量、雨情、光照等信息的探测。该装置由1个监测终端和多个探测节点组成…
百度“AI 宣言”:开发者是推动人类进步的最伟大力量
Apollo(阿波罗)生态正式诞生,已拥有50余名初始合作伙伴。Apollo是汽车工业的安卓,又比安卓更加开放、能力更强!DuerOS将唤醒万物,是唯一能做到听清、听懂、满足的人机交互系统。百度AI平台最完整、最开放、…

ESP32设备驱动-I2C-LCD1602显示屏驱动
I2C-LCD1602显示屏驱动
1、LCD1602介绍
LCD1602液晶显示器是广泛使用的一种字符型液晶显示模块。它是由字符型液晶显示屏(LCD)、控制驱动主电路HD44780及其扩展驱动电路HD44100,以及少量电阻、电容元件和结构件等装配在PCB板上而组成。
通过前面的实例我们知道,并口方式…
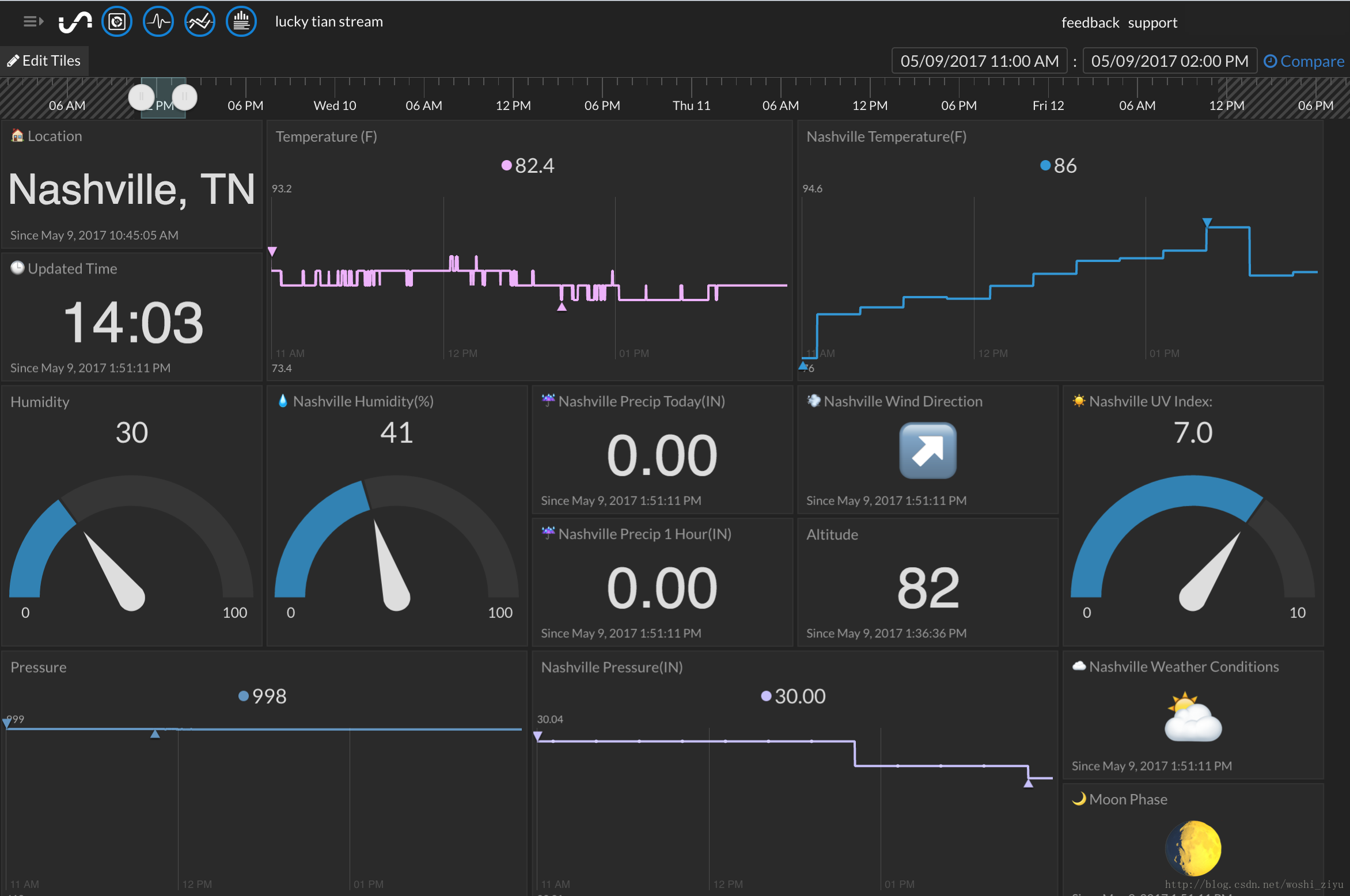
Arduino Tian开发板:一个功能强大的天气预报中心
每天都在出现新的连接设备。 Arduino携手云平台一起加入这场战斗,于是出现了一个新的挑战者 - Arduino Tian!
使用python和经典Arduino框架,本教程将引导您将您的Arduino Tian开发板变成一个天气预报中心。 但由于Lucky扩展板有那么多传感器…

利用照片携带的EXIF来估计焦距等信息
(本文章大部分内容参考Noah Snavely) 等你利用数码相机拍摄照片时,相机常常会在图片中嵌入很多有用的信息到JPEG文件中。通常涵盖曝光时间、焦点、(照相机,望远镜等的)光圈、是否闪光灯被开启了还有焦距等信…

tvp5150 若干问题,很好的解答
作者:德州仪器半导体技术(上海)有限公司 通用DSP 技术应用工程师 喻云峰 1.简介 TVP5150系列是一颗使用简易,超低功耗,封装极小的数字视频解码器。使用单一14.31818MHz时钟就可以实现PAL/NTSC/SECAM各种制式的解码&…

智能生命探测机器人的设计与实现--小论文
智能生命探测机器人的设计与实现
电子信息科学与技术 6666666666 学生姓名: 指导教师:
摘 要
地震、滑坡、泥石流等自然灾害已经严重影响和制约了人类社会经济的发展。灾后环境复杂,危险性很高,随时会发生次生灾害。这些问题都…
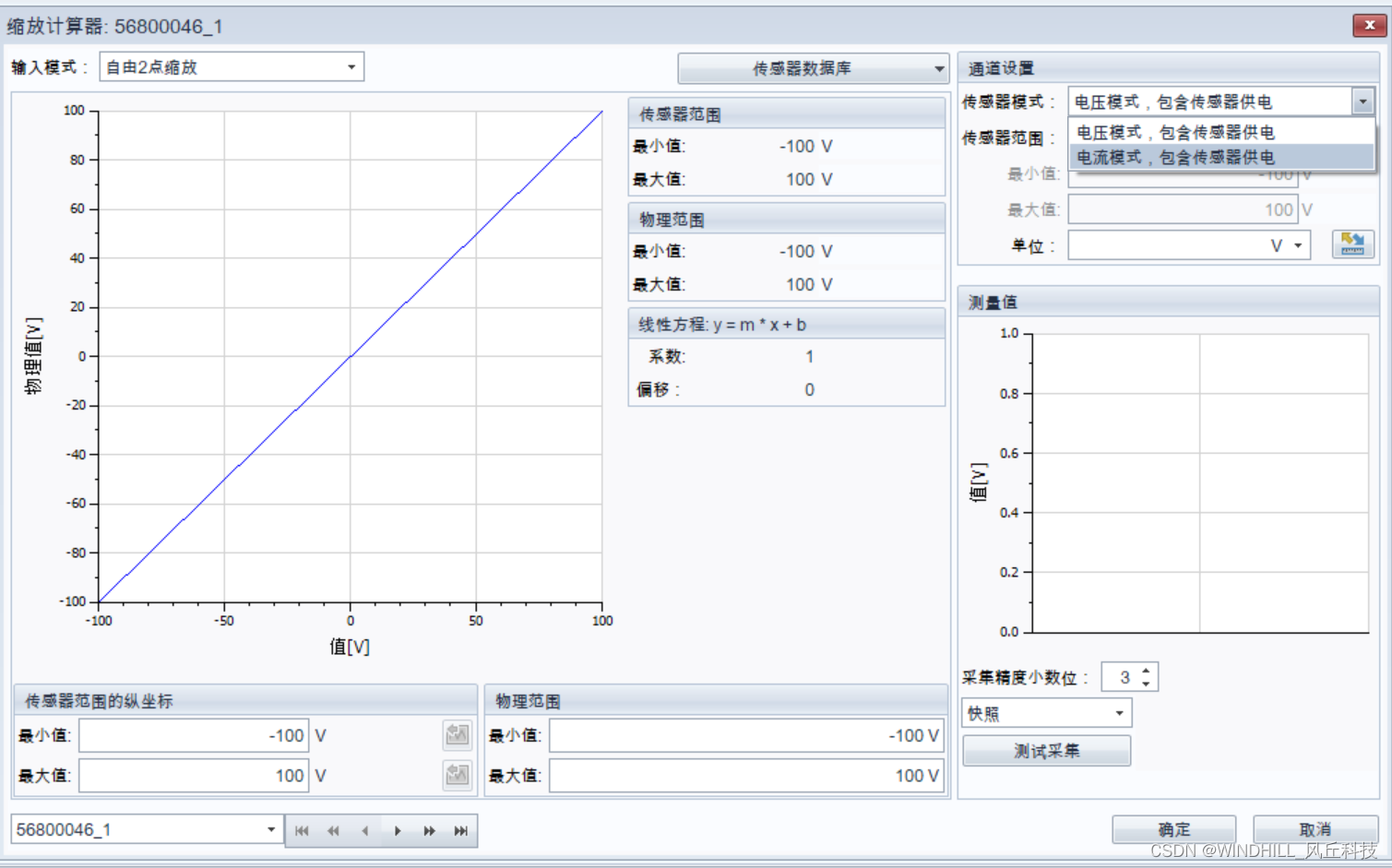
如何选择传感器输出模式——电流输出还是电压输出?
一 背景及挑战
传感器在汽车测试系统中发挥着信息的采集和传输作用,可以称为汽车的“神经元”。
按照功能可以将传感器分为压力传感器、流量传感器、温湿度传感器和电流传感器等。传感器的主要指标是精度、测量范围和响应时间等。在满足指标的情况下,通…

开启泛在物联时代:LPWAN2.0智慧物联专委会正式成立
近年来,随着人工智能、云计算、大数据等技术的不断发展,物联网市场规模也在不断扩大,成熟度不断提高,“连接”变得愈发重要。与此同时,用户对低功耗、广覆盖和低成本的连接需求也愈发迫切,低功耗广域网LPWA…
论如何编写物联网硬件程序,以自动浇花程序为例
核心思想、硬件控制部分的代码要和从软件系统逻辑中剥离出来!
一、需求分析
花盆内土壤湿度较低时,控制水泵进行浇水。
二、系统设计
有空补充。
三、模拟代码
1、普通版
import timeclass zdjh:def __init__(self):#湿度越大,数值越小…

SENT (Single Edge Nibble Transmission) 协议 接口
REF
基于SENT协议的汽车霍尔传感器实例分析 - 尚为网
汽车通信总线(五)——SENT总线介绍 - 尚为网
SENT 协议_coffee_tech的博客-CSDN博客_sent协议
SENT协议_SAE J2716_201604版 PDF
SENT信号介绍 - 知乎
关于对SENT信号传输协议的理解-面包板社区…

TI FMCW毫米波雷达基础(2)——测速原理
1.简介
测速的基本原理,是依据多普勒效应: 当移动台以恒定的速率沿某一方向移动时,由于传播路程差的原因,会造成相位和频率的变化,通常将这种变化称为多普勒频移。它揭示了波的属性在运动中发生变化的规律。 由于物体…

拉线位移传感器可以用来做的工作
拉线位移传感器可以用来做的工作 拉线位移传感器,是做什么的呢?是测位移的一种传感器,它的使用方式是用拉线测量,所以我们又叫它拉线位移传感器或者拉绳位移传感器。 拉绳位移传感器的应用非常广泛,一般只要精度要求不…

工程测量仪器:工程安全的保障者
工程仪器是现代工程建设中必不可少的工具,它们可以帮助企业对工程进行监控和管理,从而提高工程运行效率和安全性。在当前的工程建设领域,安全运营已成为企业的首要任务,而工程仪器正是实现这个目标的重要保障之一。 渗压计广泛应用…

DHT11传感器的学习使用
相比于DS18B20只能测温度,DHT11能测温度之外还能测湿度,但是DHT11的精度和测量范围都要低于DS18B20 目录DHT11简介DHT11封装与引脚说明DHT11工作原理 数据格式 工作时序 注意事项 分辨0和1的方法自己写的驱动程序(C51)DHT11简…
【EI征稿中|SPIE出版】 第四届传感器与信息技术国际学术会议(ICSI 2024)
第四届传感器与信息技术国际学术会议(ICSI 2024)
2024 4th International Conference on Sensors and Information Technology(ICSI 2024)
第四届传感器与信息技术国际学术会议(ICSI 2024)将于2024年1月5…
ESP32网络开发实例-Web服务器以仪表形式显示传感器计数
Web服务器以仪表形式显示传感器计数 文章目录 Web服务器以仪表形式显示传感器计数1、应用介绍2、软件准备3、硬件准备4、代码实现4.1 Web页面文件4.2 Web服务器代码实现在本文中,我们将介绍使用服务器发送事件 (SSE) 构建 ESP32 仪表 Web 服务器。服务器将自动向所有连接的网络…

Raspberry Pi 4B 蓝牙串口(SPP)配置与使用
Raspberry Pi 4B 蓝牙串口(SPP)配置与使用 文章目录 Raspberry Pi 4B 蓝牙串口(SPP)配置与使用1、蓝牙相关命令工具2、Linux中的蓝牙堆栈3、蓝牙串口配置4、蓝牙串口数据发送与接收 本文将详细介绍如何在Raspberry Pi 4B卡片电脑中…

Arduino开发实例-MAX30100 脉搏血氧仪传感器驱动
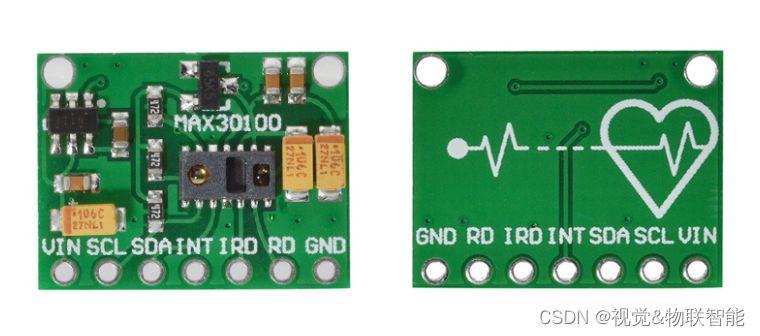
MAX30100 脉搏血氧仪传感器驱动
1、MAX30100介绍
MAX30100 脉搏血氧仪和心率传感器是一款基于 I2C 的低功耗即插即用生物识别传感器。 MAX30100 是一款集成脉搏血氧饱和度和心率监测传感器解决方案。 它结合了两个 LED、一个光电探测器、优化的光学器件和低噪声模拟信号处理,…

#HHD32F107# SPI通信
国产芯片
声明:本文旨在帮助自己记录芯片的常用配置过程。同时希望分享出自己的使用经验,让更多的人加入国产芯片的开发中。 新的技术往往都来自于模仿。从模仿到超越。芯片国产化的过程需要模仿已经比较成熟的产品,让使用者好入手ÿ…
频谱功率谱的应用与代码实现
1. 背景:
早前接手一个小项目,使用振动传感器监测风机的开关。
这里不对单片机的使用和加速度传感器的数据采集多做说明。
数据准备:振动采样频率设置为400Hz。采样点为512个点。
由离散点FFT可知,实际可以监测的频率范围&…

Arduino开发实例-AD8232心率监测传感器驱动
AD8232心率监测传感器驱动 文章目录 AD8232心率监测传感器驱动1、AD8232介绍2、硬件准备及接线3、驱动实现1、AD8232介绍
AD8232 传感器可为您提供心电图或 ECG 信号监测。 分析这些信号可以提供有关心脏功能的有用信息,例如心跳率、心律和其他有关心脏状况的信息。
该模块可…
DHT11 数字湿温度传感器的原理和应用范例
目录
概述
1、应用电路连接说明
2、DHT11 数据结构
3、DHT11的传输时序
3.1 DHT11 开始发送数据流程
3.2 主机复位信号和 DHT11 响应信号
3.3 数字‘0’信号表示方法
3.4 数字‘1’信号表示方法
4、实例应用
4.1 硬件描述
4.2 管脚分配
4.3 程序代码 概述 DHT…

NuMaker-PFM-M487开发板简介
NuMaker-PFM-M487
NuMaker平台是由Nuvoton专门针对物联网(IoT)应用开发的平台。它支持ARM mbed OS 5.5以及Arduino接口,非常适用于具有传感器和无线模块的原型开发设计的IoT应用程序开发部署。
NuMaker-PFM-M487还配备了大量外设࿰…

VIO学习笔记(二)—— IMU 传感器
学习资料是深蓝学院的《从零开始手写VIO》课程,对课程做一些记录,方便自己以后查询,如有错误还请斧正。由于习惯性心算公式,所以为了加深理解,文章公式采用手写的形式。
VIO学习笔记(一)—— 概…

ESP32设备驱动-LPS25H压阻式压力传感器驱动
LPS25H压阻式压力传感器驱动 文章目录 LPS25H压阻式压力传感器驱动1、LPS25H介绍2、硬件准备3、软件准备4、驱动实现1、LPS25H介绍
LPS25H 是一款超紧凑型绝对压阻式压力传感器。它包括一个单片传感元件和一个能够从传感元件获取信息并向外部世界提供数字信号的 I2C 接口。
传…
多传感器数据融合(一)——概述
目前数据融合系统特点:
采用的传感器类型,一般以雷达,电子情报(ELINT)接收机,电子支援测量(ESM)系统,红外,激光和可见光,声音传感器等。采用的融…

ESP32设备驱动-TCA9548A-I2C多路复用器驱动
TCA9548A-I2C 多路复用器驱动 文章目录 TCA9548A-I2C 多路复用器驱动1、TCA9548A介绍2、硬件准备3、软件准备4、驱动实现4.1 TCA9548A总线复用实现4.2 驱动多个OLED显示屏4.3 驱动多个BME280传感器在本文中,将介绍如何使用 TCA9458A I2C 多路复用器扩展 I2C 总线端口。 如果你…
多传感器数据融合五——身份融合
身份融合按融合层次可以分为三类:原始数据级,特征向量级,决策级。
5.1 身份融合算法分类
基于物理模型的方法,基于特征推理的方法,基于认识模型的方法。
物理模型
通过将实测数据与传感器观测模型数据匹配来进行身…

树莓派采集温度数据并存入数据库(C语言版)
陈拓 2020.09.22/2020.09.24
1. 概述
本文讲述树莓派用C语言程序采集温度传感器DS18B20数据,并存入SQLite和MySQL数据库。之前我们已经用Shell脚本程序实现了这些功能。
为顺利阅读本文,应先看后面参考文档中的相关内容。
《树莓派采集温度数据并存入…
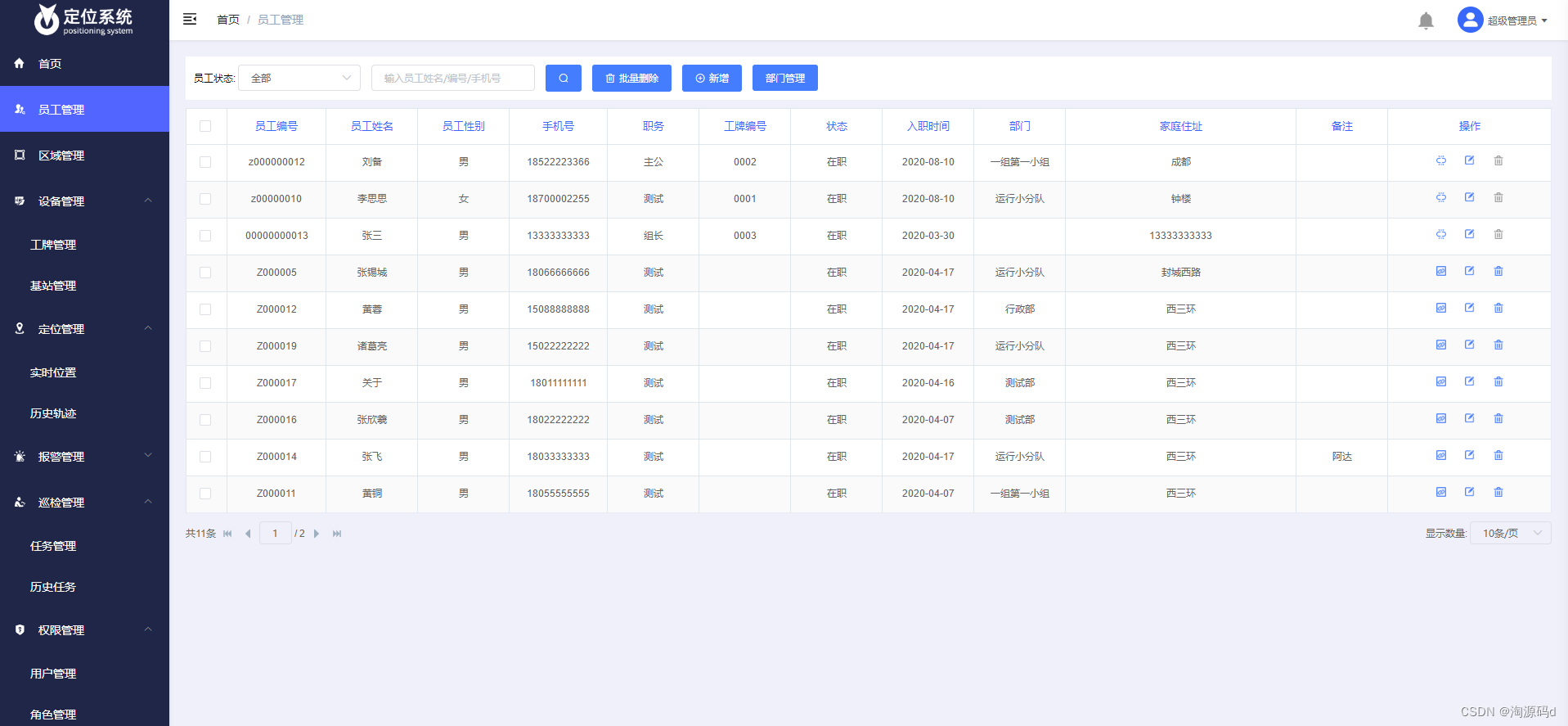
基于spring boot+ vue开发的位置数据展现和分析平台源码 UWB源码
spring boot vue位置数据展现和分析平台源码 UWB室内外高精度定位系统源码 智慧工厂是现代工厂信息化发展的新阶段,基于UWB定位技术,融合位置物联网、GIS可视化等技术,实现对人员、物资精确管理。在重点区域设置电子围栏,无权限…
IMU标定工具箱imu_tk
github上发现了一个不错的开源IMU标定工具 imu_tk 之前做IMU相关的标定时,思路没有打开,认为陀螺仪除了静止算均值等效为零偏,标度和非正交离开转台就没法测试了。 可事实上,IMU用在手机、头显等各种设备上,即便使用转…

ESP32设备驱动-HDC1080温度湿度传感器驱动
HDC1080温度湿度传感器驱动 文章目录 HDC1080温度湿度传感器驱动1、HDC1080介绍2、硬件准备3、软件准备4、驱动实现1、HDC1080介绍
HDC1080 是一款集成温度传感器的数字湿度传感器,可在极低功耗下提供出色的测量精度。 HDC1080 在很宽的电源范围内工作,是一种低成本、低功耗…

ESP32设备驱动-BME680环境传感器驱动
BME680环境传感器驱动 文章目录 BME680环境传感器驱动1、BME680介绍2、硬件准备3、软件准备4、驱动实现1、BME680介绍
BME680 是一款集成环境传感器,专为尺寸和低功耗是关键要求的移动应用和可穿戴设备而开发。 BME680 扩展了 Bosch Sensortec 现有的环境传感器系列,首次集成…
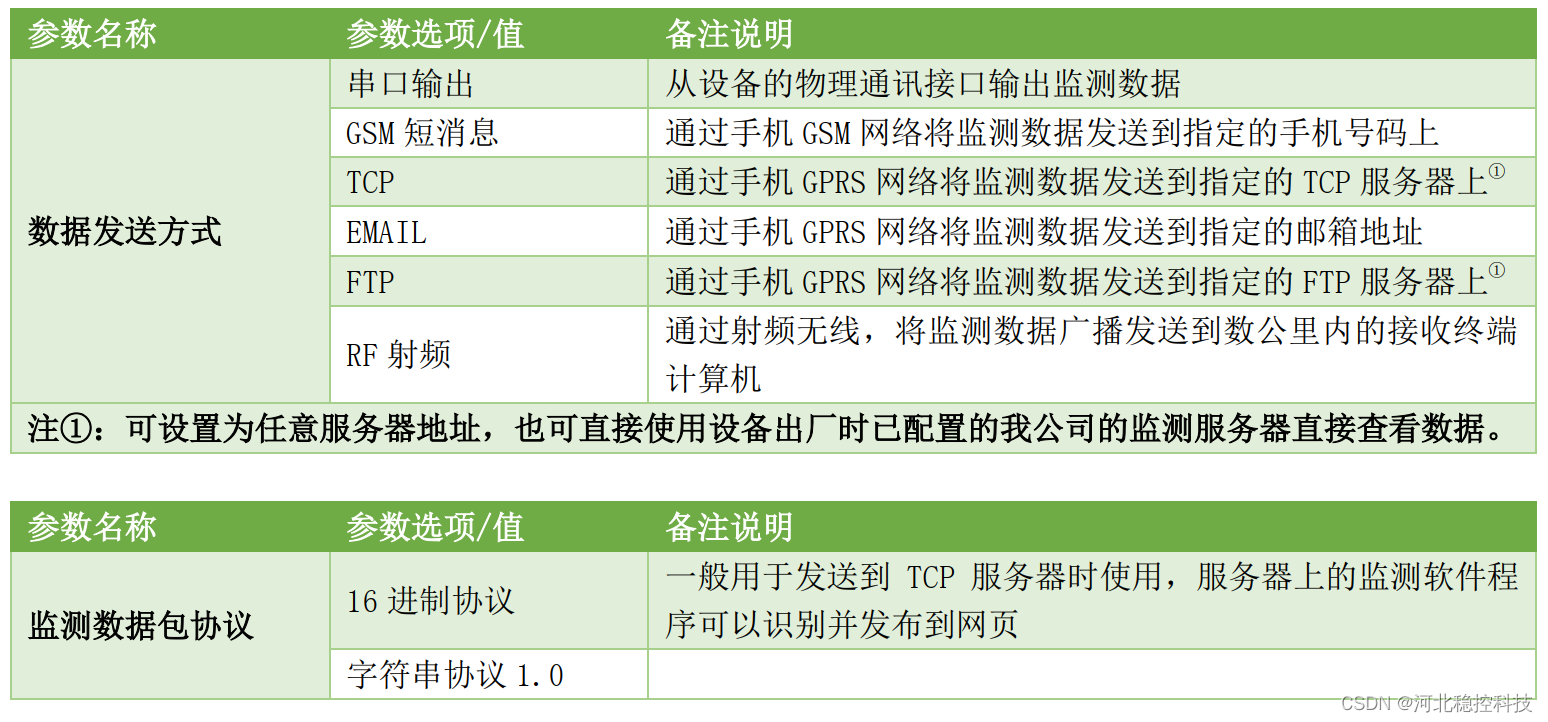
多通道振弦传感器无线采集仪 数据发送详解
多通道振弦传感器无线采集仪 数据发送过程 每次采集仪启动后会将采集到的传感器数据进行内部存储,并在设置好的时间间隔将数据发送出去,通过修改“数据发送方式”参数,监测数据可由数据接口输出也可经由无线网络发送。 在发送监测数据时&…

ESP8266-Arduino编程实例-TDS(溶解固体总量)水质传感器驱动
TDS(溶解固体总量)水质传感器驱动
TDS (Total Dissolved Solids,溶解固体总量)传感器用于计指示溶液中的总溶解固体,如盐、矿物质和金属。 这些参数可用于了解水质并比较不同来源的水。 TDS 计的主要应用之一是水族馆水质监测。 TDS具有如下特性: 输入电压:DC 3.3 ~ 5…
关于DS18B20温度传感器的时序详解及代码分析
关于DS18B20温度传感器的时序详解及代码分析
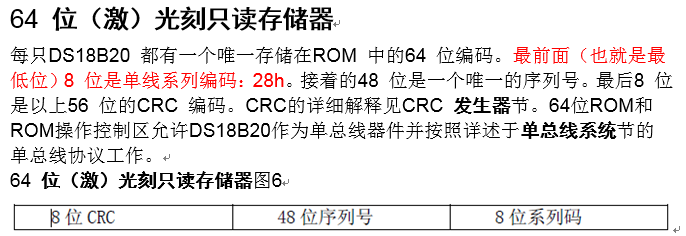
简要说明测温工作**:**DS18B20的核心功能是它的直接读数字的温度传感器。温度传感器的精度为用户可编程的9,10,11或12位,分别以0.5℃,0.25℃,0.125℃和0.0625℃…
测试技术与信号处理实验报告
目录 金属箔式应变片——单臂电桥性能实验 金属箔式应变片——半桥性能实验 金属箔式应变片——全桥性能实验 差动变压器的性能实验 直流全桥的应用——电子秤实验 交流激励时霍尔式传感器的位移特性实验 电容式传感器的位移实验 磁电式转速传感器测速实验 金属箔式应变…
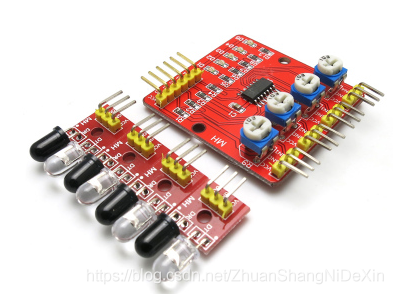
4路红外循迹模块使用教程
4路红外循迹模块使用教程 文章目录4路红外循迹模块使用教程模块详细信息:模块接线模块使用相关代码个人原创博客:点击浏览模块详细信息:
工作电压:DC 3.3V~5V
工作电流:尽量选择1A以上电源供电
工作温度:…
【国产MCU】-CH32V307-模拟/数字转换器(ADC)
模拟/数字转换器(ADC) 文章目录 模拟/数字转换器(ADC)1、ADC介绍2、ADC驱动API介绍3、ADC使用实例3.1轮询方式采样3.2 中断方式采样3.3 DMA方式读取数据3.4 读取温度传感器值CH32V307内嵌2个12位的模拟/数字转换器(ADC),共用多达16 个外部通道和2 个内部通道采样,可编程的通道…


【集创赛】arm杯一等奖作品:智能BLDC驱动系统
本次推荐2020年集创赛arm杯的一等奖作品!赛题要求实现"基于 Arm 处理器核的智能化 SoC 设计",下面是他们的作品介绍! 本转载已获得作者授权!Arm杯-基于Arm处理器的智能化SoC设计挑战赛赛题杯赛题目:基于 Arm 处理器的智…

DS18B20使用详解
DS18B20单线数字温度传感器,支持“一线总线”接口,测量温度范围为-55摄氏度到125摄氏度,精度为0.5摄氏度。大大提高了系统的抗干扰性。适合于恶劣环境的现场温度测量。支持3V~5.5V的电压范围。 DS18B20中的温度传感器完成对温度的测量&#x…
PLC实训 — 传感器介绍
传感器传感器定义磁性开关-原理磁性开关-接线光纤传感器检测模块(三个传感器)皮带未端传感器传感器定义 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息&a…

ESP32网络开发实例-非接触式水位监测
非接触式水位监测 文章目录 非接触式水位监测1、HC-SR04介绍2、软件准备3、硬件准备4、代码实现在本文中,我们将使用 HC-SR04 超声波传感器和 ESP32 创建一个水位监测网络服务器。 这将是一个非接触式水位测量系统。 首先,我们将介绍HC-SR04 与 ESP32 连接。 使用ESP32对超声…

Arduino开发实例-液体流量测量
液体流量测量 文章目录 液体流量测量1、流量传感器介绍2、硬件准备及接线3、代码实现在本文中,将介绍如何流量传感器进行测量液体流量。 流量传感器用于测量液体流速。 市场上有不同类型的流量传感器,在本文中,我们将使用霍尔效应流量传感器。 这些类型的流量传感器是非侵入…

ESP32设备驱动-内置电容触摸传感器
内置电容触摸传感器 文章目录 内置电容触摸传感器1、电容触摸传感器介绍2、软件准备3、硬件准备4、代码实现本文将详细介绍如何使用ESP32的内置电容式传感器。 1、电容触摸传感器介绍
ESP32 具有可用作触摸按钮的电容式传感器。 这些是引脚排列上著名的TOUCH引脚。 在开发板的…
Android 指南针校准进度计算实现
关于Android中指南针的实现,我们可以使用传感器来获取设备的方向信息,从而实现指南针功能。 Overrideprotected void onCreate(Bundle savedInstanceState) {super.onCreate(savedInstanceState);sensorManager (SensorManager) getSystemService(Conte…

自动驾驶传感器:传感的本质
自动驾驶传感器:传感的本质 附赠自动驾驶学习资料和量产经验:链接
0. 前言
这个系列的背景是:工作时候需要攒一台数据采集车辆,那段时间需要熟悉感知硬件,写了不少笔记,都是些冗长的文章,感兴…

【嵌入式DIY实例】-土壤养分实时分析
使用NPK传感器进行实时土壤养分分析 智能农业:使用 Arduino 和 NPK 传感器进行实时土壤养分分析 文章目录 使用NPK传感器进行实时土壤养分分析1、土壤NPK传感器介绍2、MAX485 RS485收发模块介绍3、硬件准备4、代码实现本文将介绍如何使用 Arduino 和 NPK 传感器实时测量土壤养…
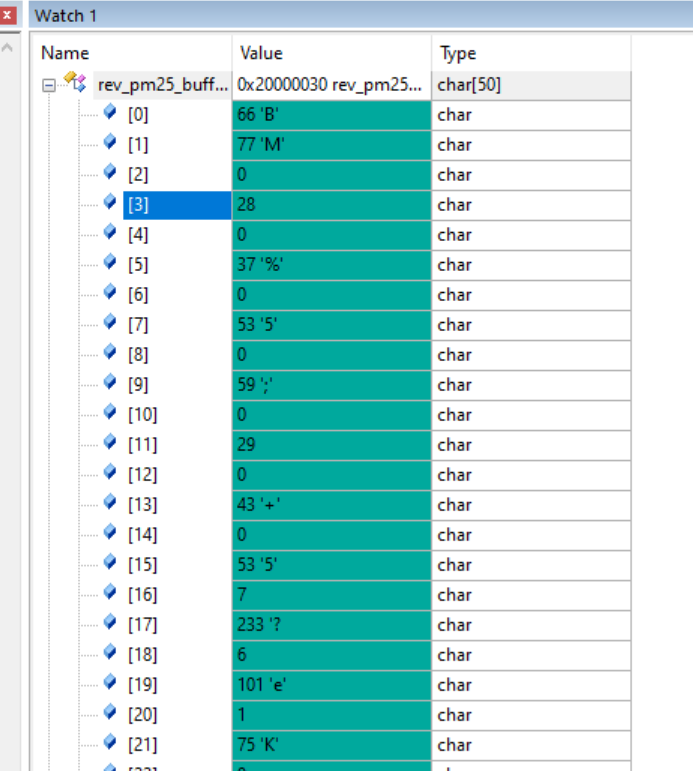
【单片机】PMS5003,PM2.5传感器数据读取处理
文章目录 传感器介绍数据处理解析pm2.5的代码帮助、问询 传感器介绍
PMS5003是一款基于激光散射原理的数字式通用颗粒物浓度传感器,可连续采集 并计算单位体积内空气中不同粒径的悬浮颗粒物个数,即颗粒物浓度分布,进而 换算成为质量浓度,并以通用数字接口形式输出。本传感器可…

Arduino开发实例-EMG 肌肉信号传感器
EMG 肌肉信号传感器 文章目录 EMG 肌肉信号传感器1、EMG 肌肉信号传感器介绍2、硬件准备及接线3、代码实现1、EMG 肌肉信号传感器介绍
在医学研究中,测量肌肉的活动、收缩和扩张非常重要。 EMG 肌肉传感器测量肌肉活动并产生信号以显示扩张和收缩量。 因此,输出取决于所选肌…
智能传感器之功耗优化原则
功耗优化和软件优化是很类似的,可以参考软件优化的原则。
http://blog.csdn.net/zoomdy/article/details/72650658 mingdu.zheng at gmail dot com
不要过早优化
开始优化之前,至少得有一个具备全功能的雏形了。没有全功能雏形就开始优化,…
ESP32网络开发实例-Web显示传感器实时数据
Web显示传感器实时数据 文章目录 Web显示传感器实时数据1、软件准备2、硬件准备3、代码实现3.1 Web页面代码实现4.2 Web服务器代码实现本文将详细介绍如何使用ESP32在 Web 服务器上绘制传感器读数(温度、湿度和压力)。 ESP32 将托管一个网页,其中包含三个实时图表,每 30 秒…
【国产MCU】-CH32V307-GPIO控制-外部中断
GPIO控制-外部中断 文章目录 GPIO控制-外部中断1、CH32V307中断介绍2、GPIO外部中断相关API3、外部中断使用代码实现CH32V3x 系列内置可编程快速中断控制器(PFIC– Programmable Fast Interrupt Controller),最多支持255 个中断向量。当前系统管理了88 个外设中断通道和8 个…
MPU6050使用心得(简单分享一下)
前言
选用MPU6050做 倾斜检测 功能。
前期准备
开发板:正点原子STM32F103 精英版(STM32F103ZET6)
模块:GY-521 MPU6050
其他:杜邦线若干、烧录线、FlyMcu、Keil5、正点原子开发板配套的套件(TFTLCD&…
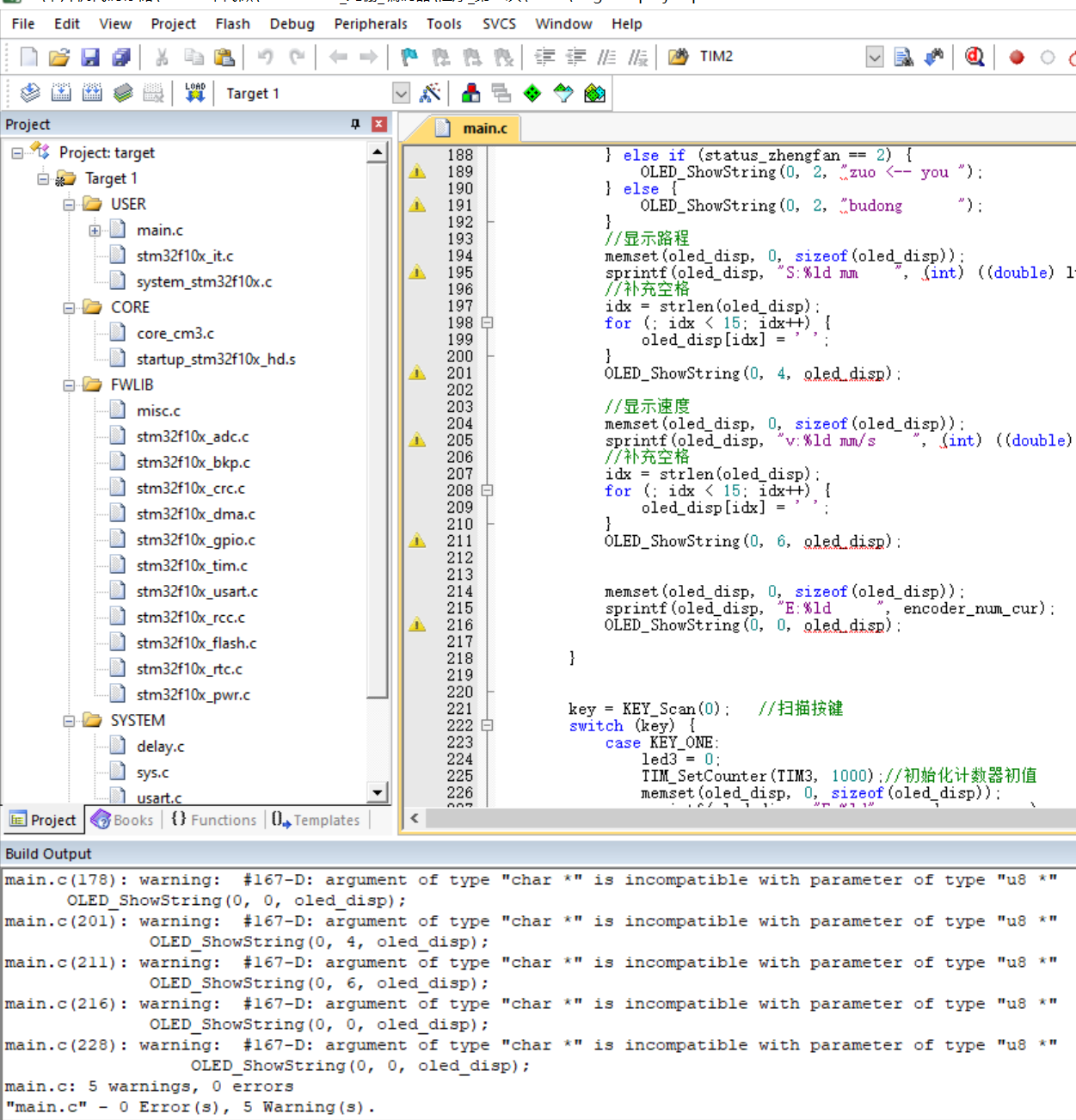
【程序】STM32 读取光栅_编码器_光栅传感器_7针OLED
文章目录 源代码工程编码器基础程序参考资料 源代码工程
源代码工程打开获取:
http://dt2.8tupian.net/2/28880a55b6666.pg3这里做了四倍细分,在屏幕上显示 速度、路程、方向。 接线方法:
单片机--------------串口模块 单片机的5V-------…

Arduino与树莓派(RaspberryPi)有什么区别
Arduino
Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。 Arduino能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。板子上的微控…

ESP32设备驱动-BMA250加速度传感器驱动
BMA250加速度传感器驱动 文章目录 BMA250加速度传感器驱动1、BMA250介绍2、硬件准备3、软件准备4、驱动实现1、BMA250介绍
BMA250 是一款先进的超小型三轴低重力加速度传感器,具有数字接口,适用于低功耗消费电子应用。
BMA250 允许测量 3 个垂直轴上的加速度,从而感应手机…

设备健康管理系统助力制造企业实现数字化转型
在当今快速变革的制造业环境中,数字化转型已成为制造企业保持竞争力和实现可持续发展的关键。在这个数字化转型的浪潮中,设备健康管理系统正发挥着重要的作用。设备健康管理系统通过实时监测、预测分析和智能诊断等功能,为制造企业提供了全面…
什么是IoT物联网平台,以及如何做平台选型
1. 什么是物联网平台
物联网(The Internet of Things,简称IOT)是指通过各种传感器设备采集、监控物体状态信息,并通过多样的网络连接手段将物体状态信息与互联网连通,实现对物品和过程的智能化感知、识别和管理。
一…
stm32之雨滴传感器使用记录
一、简介 雨滴传感器、烟雾传感器(MQ2)、轨迹传感器、干黄管等的原理都类似,都是将检测到的信号通过LM393进行处理之后再输出,可以输出数字信号DO(0和1)和模拟信号A0。 雨滴传感器在正常情况下是AO输出的是…

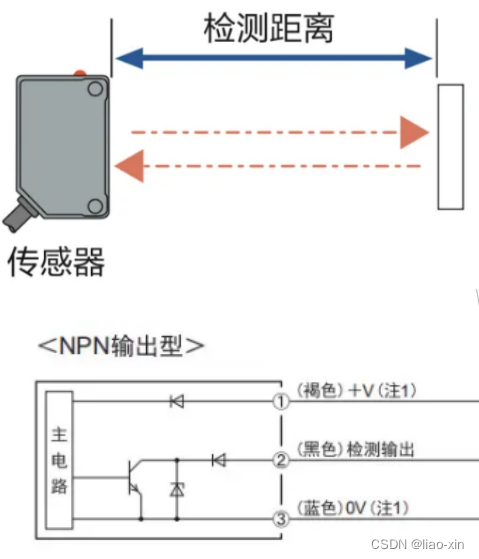
Arduino开发实例-欧姆龙E3Z-D61光电传感器
欧姆龙E3Z-D61光电传感器 文章目录 欧姆龙E3Z-D61光电传感器1、E3Z-D61光电传感器介绍2、硬件准备及接线3、代码实现1、E3Z-D61光电传感器介绍
Omran 光电传感器可用于检测 5 至 100 毫米距离内的障碍物和物体。 传感器上有一个 LED,它始终熄灭,并在检测到障碍物时亮起。 您…

Arduino开发实例-HW-M10 微波雷达运动传感器
HW-M10 微波雷达运动传感器 文章目录 HW-M10 微波雷达运动传感器1、HW-M10 微波雷达运动传感器介绍2、硬件准备及接线3、代码实现1、HW-M10 微波雷达运动传感器介绍
HW-M10 微波传感器模块非常准确,广泛用于报警和安全系统中的运动检测。 该模块与 PIR 模块一样,可以检测任何…

【国产MCU】-认识CH32V307及开发环境搭建
认识CH32V307及开发环境搭建 文章目录 认识CH32V307及开发环境搭建1、CH32V307介绍2、开发环境搭建3、程序固件下载1、CH32V307介绍
CH32V307是沁恒推出的一款基于32位RISC-V设计的互联型微控制器,配备了硬件堆栈区、快速中断入口,在标准RISC-V基础上大大提高了中断响应速度…

ESP32设备驱动-SCD40二氧化碳湿度和温度传感器驱动
SCD40二氧化碳湿度和温度传感器驱动 文章目录 SCD40二氧化碳湿度和温度传感器驱动1、SCD40介绍2、硬件准备3、软件准备4、驱动实现1、SCD40介绍
SCD4x 是 Sensirion 的下一代微型 CO2 传感器。 该传感器基于光声 NDIR 传感原理和 Sensirion 的专利 PASens 和 CMOSens 技术,以…
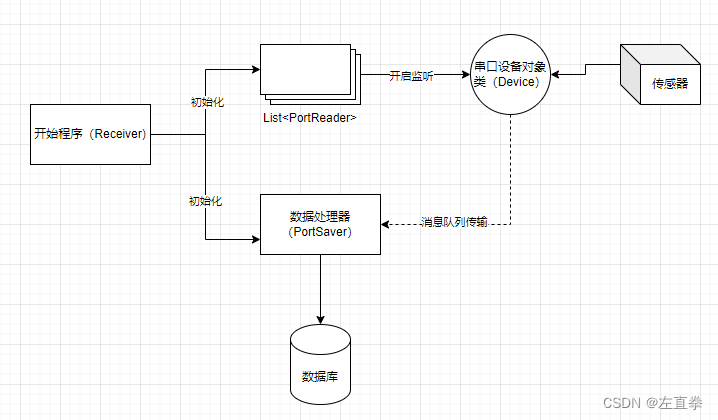
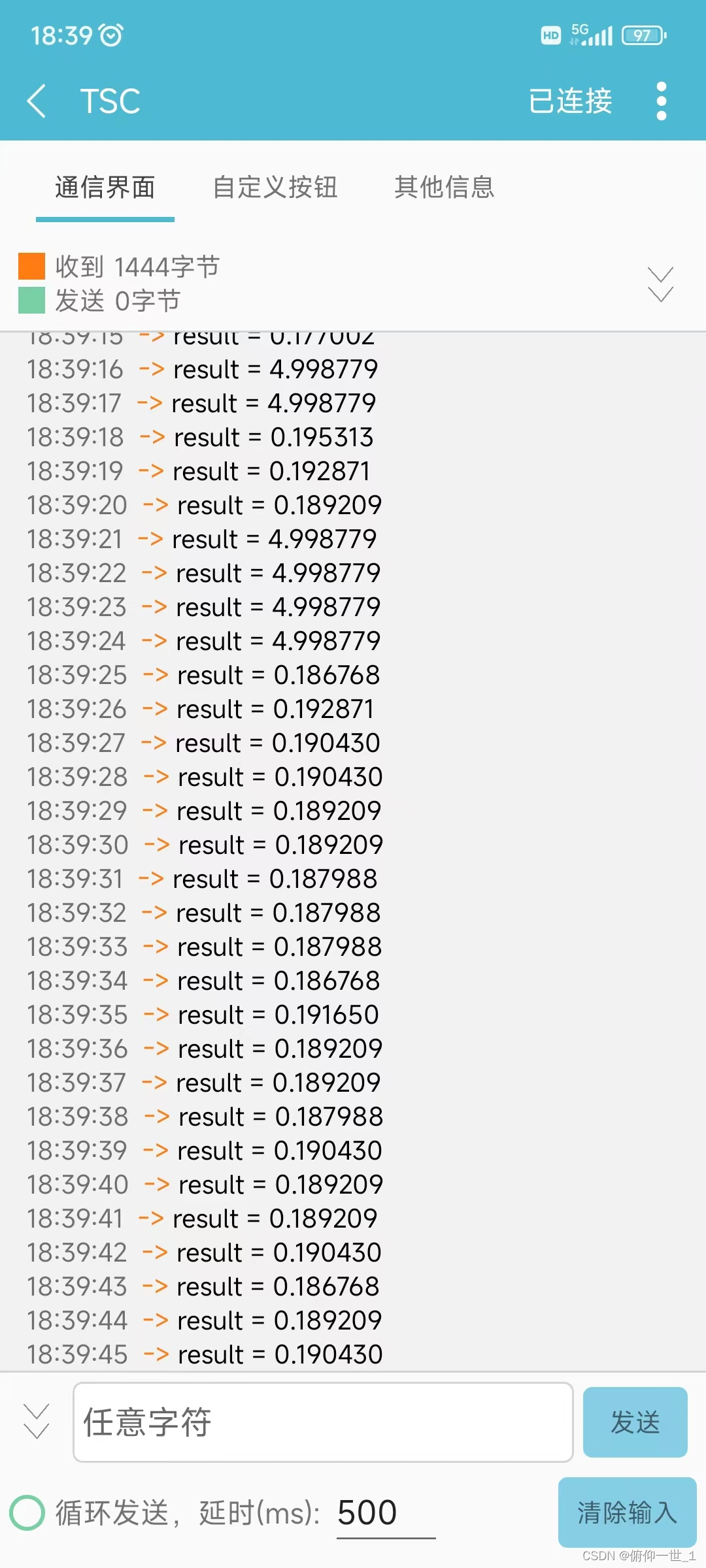
java程序读取并控制串口设备
监听串口,接收它们发过来的数据,进行处理。
一、概况
前不久做的一个项目,需要读取水下传感器的数据。这些传感器通过串口与外界交互。我们写了一个java程序,接收传感器传送的数据,同时也下发命令,控制部…
自动驾驶传感器:惯性导航IMU原理
自动驾驶传感器:惯性导航IMU原理 附赠自动驾驶学习资料和量产经验:链接
组合导航里包含了GNSS卫星导航模块与IMU惯性导航模块,前一篇文章写了GNSS模块,本章写IMU惯导,也是本系列最后一篇文章。
1. 惯性测量单元&…
ESP32设备驱动-MAX30100心率监测传感器驱动
MAX30100心率监测传感器驱动
1、MAX30100介绍
MAX30100 是一款集成脉搏血氧饱和度和心率监测传感器解决方案。 它结合了两个 LED、一个光电探测器、优化的光学器件和低噪声模拟信号处理,以检测脉搏血氧饱和度和心率信号。
MAX30100 采用 1.8V 和 3.3V 电源供电,可通过软件…

ESP32网络开发实例-Web页面控制直流电机
Web页面控制直流电机 文章目录 Web页面控制直流电机1、应用介绍2、软件准备3、硬件准备4、代码实现在这个 ESP32 Web务器应用中,我们将创建一个托管在 ESP32 上的网页,我们将使用该网页来控制使用 L298N 电机驱动器模块的直流电机的速度。 网页将包含一个 HTML 滑块,用于为直…

VL53L4CX TOF开发(1)----驱动TOF进行测距
VL53L4CX TOF开发.1--驱动TOF进行测距 概述视频教学样品申请完整代码下载主要特点硬件准备技术规格系统框图应用示意图生成STM32CUBEMX选择MCU串口配置IIC配置 XSHUTX-CUBE-TOF1演示结果 概述
VL53L4CX 是一款先进的激光距离传感器,专为长距离和多目标测量设计&…
智芯传感MEMS压力传感器促进无人机跨入极其广阔的应用市场
2022年11月8日至13日,第十四届中国国际航空航天博览会在广东珠海国际航展中心举办。伴随着人工智能技术的进步,全球无人化装备的发展如火如荼。各式各样的无人机在无人化装备中可谓是一枝独秀,广受外界的高度关注。 据美国《Aviation Week&am…

ESP32设备驱动-MLX90615红外测温仪驱动
MLX90615红外测温仪驱动
1、MLX90615介绍
MLX90615 是一款用于非接触式温度测量的微型红外温度计。 IR 敏感热电堆探测器芯片和信号调节 ASIC 都集成在同一个微型 TO-46 罐中。 红外测温仪出厂时经过数字 SMBus 输出校准,可在完整温度范围内以 0.02 C 的分辨率完全访问测量温…

SLAM总结(一)- SLAM原理概述与简介
SLAM总结(一)- SLAM原理概述与简介SLAM(Simultaneous Localization and Mapping):同时定位和建图,定位是定位机体在世界坐标系下的位姿(pose、transformation)。单传感器机体一般指相…

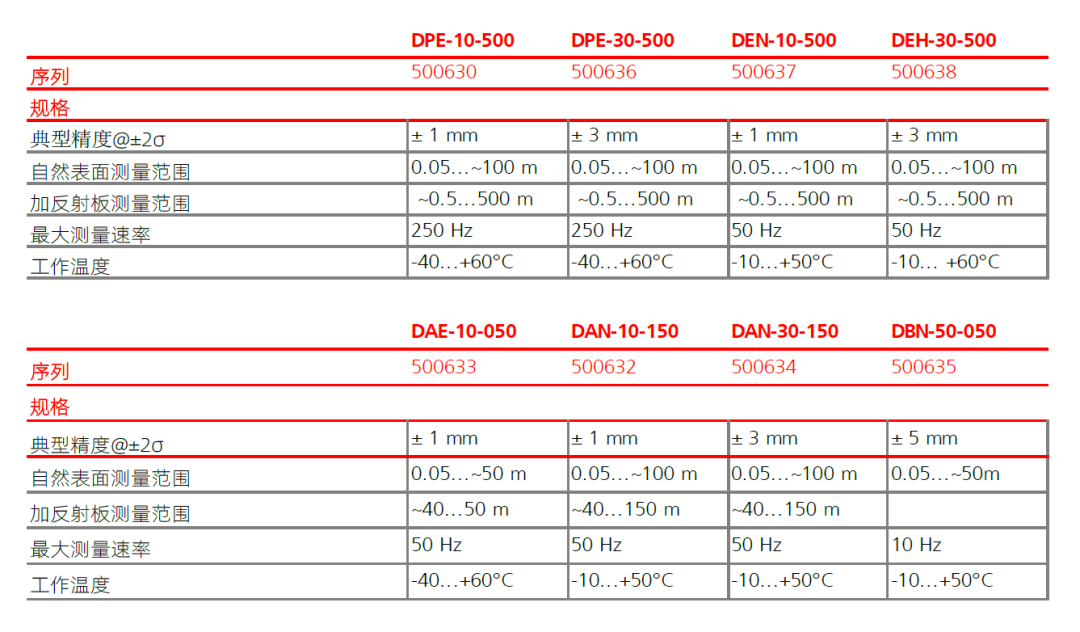
虹科激光测距 | 用传感器对防洪闸门进行方位检测
防洪闸门的方位监测
应用领域:测地学和建筑学,水利技术
应用类型:方位监测及监控
描述:
当洪水发生时,防洪闸门确保了大量囤积的水可以有控制的排出。为了确定溢流量,掌握闸门的准确位置是非常必要的。…

传感器 | 密度测量系列:2.谐振密度传感器
简介
本文主要介绍了一种应用谐振原理进行测量的密度测量方法,详细的分析了这种密度测量方法的原理和优缺点,并简单介绍国际上的一些已商用的谐振密度计。
01 利用谐振进行密度测量的原理
谐振密度传感器的测量原理,是通过谐振时的谐振频率…

Python与Arduino绘制超声波雷达扫描
视频连接:https://m.bilibili.com/video/BV1xf4y1X79p
前段时间看到一位发烧友制作的超声波雷达扫描神器,用到了Arduino和Processing,可惜啊,我不会Processing更看不懂人家的程序,咋办呢?嘿嘿,…
细数2018世界杯上的黑科技
小编觉得看世界杯是很奇怪的操作因为不能跟中国的赞助商、小龙虾一起去俄罗斯看看世界杯所以,只能跟中国球员一起坐在电视机前吃着泡面,玩着手机看着年轻的千万富翁们在球场上跑来跑去足球是一件有激情的事儿足球解说喜欢把球场比作战场足球烧钱的程度可…
各类传感器的不同功能和应用
我们在物联网的方案设计中,需要用到各种各样的传感器以实现其功能。例如在充气泵方案开发中,就需要用到压力传感器来实现测量气压值的一个必不可缺的器件。
当然,不同种类的传感器作用大不相同,今天peakcoo就来分享以下其中传感器…

基于 Arduino 和 IoT 云平台搭建物联网系统
原文:Building an IoT System Using Arduino and IoT Cloud Platform 责编:屠敏,关注物联网、移动开发领域,寻求报道或投稿请发邮件tumincsdn.net。 在这篇文章中,我们将介绍如何搭建一款监测土壤水分的物联网系统&am…

从传感器和算法原理讲起,机器人是如何避障的
导语:本文内容来自大道智创CTO邢志伟在雷锋网硬创公开课的分享,由雷锋网旗下栏目“新智造”整理。编者按:本文内容来自大道智创CTO邢志伟在雷锋网(公众号:雷锋网)硬创公开课的分享,由雷锋网旗下栏目“新智造”整理。 避…
水库大坝的安全监测内容包括哪些?
在水库大坝的实时监测中,主要任务是通过无线传感网络监测各个监测点的水位、水压、渗流、流量、扬压力等数据,并在计算机上用数据模式或图形模式进行实时反映,以掌握整个水库大坝的各项变化情况。大坝安全监测系统能实现全天候远程自动监测&a…
ESP32设备驱动-SHT30温度湿度传感器驱动
SHT30温度湿度传感器驱动 文章目录 SHT30温度湿度传感器驱动1、SHT30介绍2、硬件准备3、软件准备4、驱动实现1、SHT30介绍
SHT30数字温度和湿度传感器分线板基于 Sensirion SHT30 传感器 IC。 得益于Sensirion的CMOSens技术,高度集成的电容式湿度传感元件和带隙温度传感元件,…
ESP32网络开发实例-物联网声污染监测系统
物联网声污染监测系统 文章目录 物联网声污染监测系统1、KY-038 声音传感器模块2、软件准备3、硬件准备4、代码实现在本文中,我们将使用 ESP32、声音模块和 Blynk 应用程序创建一个基于物联网的声音污染监测系统。 我们将使用 KY-038 麦克风传感器以分贝为单位检测声音并在 OL…
ESP32设备驱动-LED控制器生成PWM信号
LED控制器生成PWM信号 文章目录 LED控制器生成PWM信号1、LED控制器介绍2、软件准备3、硬件准备4、代码实现PWM 是一种在数字引脚上获取类似模拟信号的方法。PWM实际上是一个在高电平和低电平之间切换的方波信号,在 0V 和 3.3V 之间。 当信号为 HIGH 和 LOW 时,这种连续的 HIG…
ESP32设备驱动-GPIO外部中断
GPIO外部中断 文章目录 GPIO外部中断1、GPIO中断介绍2、GPIO中断使用步骤3、软件准备4、硬件准备5、代码实现在前面的文章
ESP32设备驱动-GPIO数字输入与输出中介绍如何对GPIO进行控制操作。本文将在该基础上使用GPIO中断进一步优化按键输入。即演示如何使用GPIO中断。 1、GPI…
物联网传感器市场的六个特点分析
什么是传感器
传感器:传感器是一种检测装置,能感受到被测量的信息,并能将感受到信息变换信号或者其他所需形式进行输入去,以满足信息的收集、传输、存储、控制等要求。当然这都是官方的话语,看起来比较难理解。相比较…

ESP32设备驱动-MCP23017并行IO扩展驱动
MCP23017并行IO扩展驱动
1、MCP23017介绍
MCP23017是一个用于 I2C 总线应用的 16 位通用并行 I/O 端口扩展器。 16 位 I/O 端口在功能上由两个 8 位端口(PORTA 和 PORTB)组成。 MCP23017 可配置为在 8 位或 16 位模式下工作。 其引脚排列如下: MCP23017 在 3.3v 下工作正常…
ESP32设备驱动-ISL29125 RGB颜色光传感器驱动
ISL29125 RGB颜色光传感器驱动 文章目录 ISL29125 RGB颜色光传感器驱动1、ISL29125介绍2、硬件准备3、软件准备4、驱动实现1、ISL29125介绍
ISL29125 是一款具有 I2C(SMBus 兼容)接口的低功耗、高灵敏度、红色、绿色和蓝色光传感器 (RGB)。 其先进的光电二极管阵列提供准确的…
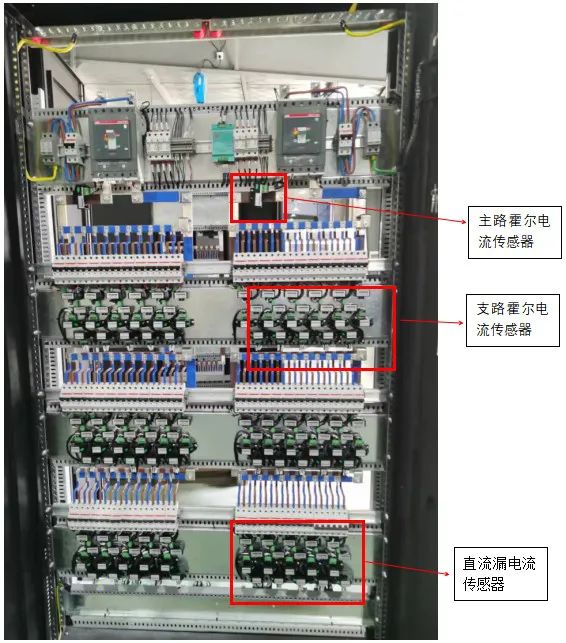
霍尔电流传感器的注意事项及其在直流列头柜中的应用
安科瑞虞佳豪
霍尔电流传感器注意事项
(1)电流传感器必须根据被测电流的额定有效值适当选用不同的规格的产品。被测电流长时间超额,会损坏末极功放管(指磁补偿式),一般情况下,2倍的过载电流…

ESP32设备驱动-TMP006 红外热电堆传感器驱动
TMP006 红外热电堆传感器驱动 文章目录 TMP006 红外热电堆传感器驱动1、TMP006介绍2、硬件准备3、软件准备4、驱动实现1、TMP006介绍
Texas Instruments 的 TMP006 是一系列温度传感器中的第一款,无需接触物体即可测量物体的温度。 它使用非常灵敏的热电堆来测量从物体表面发…
分享推荐国产温湿度传感器兼容平替SHT30
RAMSUN分享推荐温湿度传感器可用于替代盛思锐SHT30。在硅基CMOS晶圆上集成高灵敏度MEMS湿敏元件,从而可以减少多芯片信号传输的干扰,降低芯片面积,提高封装可靠性。它有两个供用户选择的I2C地址,I2C通信速度高达1MHz,芯…

民用飞机飞控系统传感器故障诊断研究综述
导语
飞控系统中的各类传感器对飞机稳定与操纵起着至关重要的影响,是飞机的重要安全机载设备之一。传统冗余方法具有“安全性高,经济性低”的特点,通过多余度设计来提升系统的安全性给飞机的重量与结构设计、系统综合集成、维修与检测成本都…
百度智能车竞赛丝绸之路智能车设计与编程实现控制
一、项目简介
本项目现已基于鲸鱼机器人开发套件对其整体外形进行设计,并且对应于实习内容——以“丝绸之路”为题,对机器人各个功能与机器人结构部分进行相关设计与调整。主要可以实现“车道线巡检”“音乐交际”、“城堡检测”、“翻山越岭”。
本项…
51单片机学习笔记(清翔版)(21)——ADDA数模转换
A:anolog模拟的 D:digital数字的 AD模拟转数字,DA数字转模拟 生活中的基本都是模拟量,如温度,可以是10℃,10.1℃等 手机的背光亮度自动调节,拿到太阳光下,亮度会增亮&#x…

一个普通摄像头就能让二次元老婆“活”过来,网友:求收费
鱼羊 明敏 发自 凹非寺量子位 报道 | 公众号 QbitAI你敢信,这年头只靠一个普通摄像头,就能让二次元老婆实时完成如此灵活的手指舞?没错,不用穿戴硬件设备,打开电脑摄像头,AI就能让二次元老婆随你实时舞动。…

ESP32-CAM高性价比温湿度监控系统
ESP32-CAM ArduinoIDE开发系列文章目录 第一篇:ESP32-CAM高性价比WIFI图传方案快速入门教程 第二篇:ESP32-CAM第一个无线点灯程序 第三篇:ESP32-CAM智能网关的设计与实现 第四篇:ESP32-CAM创建热点构成并发式DNS服务器 第五篇&…

为智能化与物联网提供高性能传感器,世强硬创获智感科技授权代理
近几年,我国MEMS传感器行业市场规模增长均保持在20%左右,已经成为全球MEMS市场发展最快的地区。
为满足日益增长的市场需求,为用户提供高性能传感器产品,世强先进(深圳)科技股份有限公司(下称“…

零代码搭建一个温度传感器数据采集与显示软件
1 概述 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示…
多传感器数据融合四-轨迹及融合
4.1 简述
加权协方差融合发、信息矩阵融合法、伪测量融合法和基于模糊集理论的模糊航迹融合算法等应用较广泛。
4.2 轨迹管理
4.2.1 逻辑法
1.轨迹头-每条轨迹的第一个点:新检测到的点,未匹配上的孤立的点,噪声点迹。需要建立一个较大的环…

物联网大棚可控制哪些因素
1. 温度
生物的生存对温度的要求很高,只能在一个比较窄的范围。温度对生物的作用可分为最低温度、最适温度和最高温度,即生物的三基点温度。当环境温度在最低和最适温度之间时,生物体内的生理生化反应会随着温度的升高而加快,代谢…

STM32通过硬件I2C读写控制AM2311温湿度传感器模块打印输出数据
程序功能说明:1、通过I2C硬件查询方式驱动AM2311。2、获取AM2311测得的温度和湿度并串口打印输出。3、使用I2C1。程序注意事项:1、AM2311在测试完数据后会进入一个休眠模式,程序需要向AM2311发送一个任意的数据将其唤醒,发送这个数…

STM32通过AM2311传感器测温湿度并在LCD上显示
程序功能说明: 1、通过AM2311传感器测量温湿度并在LCD上显示。 2、显示的数字是通过字模软件取模并以数组的方式储存在内部FLASH里面的。 3、测得的温湿度也通过串口打印输出。程序注意事项: 1、由于LCD是用FSMC驱动的,所以不能用I2C1&#x…

ESP32设备驱动-OLED显示BME280传感器数据
OLED显示BME280传感器数据 文章目录 OLED显示BME280传感器数据1、BME280介绍2、硬件准备3、软件准备4、代码实现在本文中,我们将介绍如何使用OLED显示BME280传感器的数据。 1、BME280介绍
BME280 传感器用于测量有关环境温度、大气压力和相对湿度的读数。 它主要用于以低功耗…

树莓派自动饮水机编程示例
一、准备物品
1. 树莓派ZeroWH(针脚焊接) (100元) 2. DC电池盒(2节装)(1元) 3. 18650锂电池2节(10元) 4. 小水泵(3元) 5. 继电器&…

【iShout】智能家居,我们真的想好怎么做了吗?
转载自:http://www.ifanr.com/467381 在过去的 50 年间,雅虎、思科、微软、苹果、阿里巴巴、腾讯等众多的公司先后出现 IT 领域最受瞩目的聚光灯下,各领风骚。在人们津津乐道于各个公司产品对生活的改善,对技术潮流的引领时&#…

模拟小信号调理电路(智能车电磁组)
一、智能车竞赛电磁组:
官方规定:漆包线上产生"20KHz 100mA"的交变电磁方波信号。 二、传感器检测调理电路(分立元件):谐波选频电路、交流放大电路、整流滤波电路。
距离漆包线上方约15~20cm处,工字电感检测到的信号约…

【电路笔记】-电感器
电感器 文章目录 电感器1、概述2、电感器的时间常数3、电感器示例1 电感器是一种由线圈组成的无源电气元件,其设计目的是利用电流通过线圈而产生的磁力和电力之间的关系。 1、概述
在本中,我们将看到电感器是一种电子元件,用于将电感引入到电…
Ubuntu22.04 roshumble 跑 mid360 SDK
基于:编译livox ros driver2(ROS2、livox、rviz、ubuntu22.04)_HIIWAR_ZB的博客-CSDN博客
驱动官网链接:GitHub - Livox-SDK/livox_ros_driver2: Livox device driver under Ros(Compatible with ros and ros2), support Lidar H…
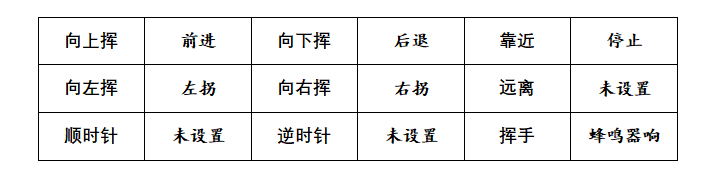
基于PAJ7620的主从机通信远程控制蓝牙智能小车
这是大三上传感器大作业做的一个主从机控制小车。期间参考了网上的一些博客,涉及主从机通信、蓝牙配置、传感器的使用等。 文章目录一、实物图片二、系统架构三、主要外设四、手势控制对应关系五、应用场景与待改进六、参考文章七、代码实现一、实物图片 二、系统架…
虹科传感器:玻璃制造业中的控制系统上的“侦查员”
传送带上的玻璃面板什么时候停止,只能由托盘高度决定,而怎么才能精确得知托盘高度,只有虹科激光测距传感器才能决定,一起来通过这篇文章了解一下吧~ 介绍
应用领域:玻璃业
应用类型:位置测量
案例描述 处…

ISP图像质量调节介绍
ISP
(Image Signal Processor),即图像处理,主要作用是对前端图像传感器输出的信号做后期处理,主要功能有线性纠正、噪
声去除、坏点去
除、内插、白平衡、自动曝光控制等,依赖于ISP才能在不同的光学条件下都能较好的还原现场细节&…

ESP32网络开发实例-Web服务器显示LM35传感器数据
Web服务器显示LM35传感器数据 文章目录 Web服务器显示LM35传感器数据1、LM35介绍2、软件准备3、硬件准备4、代码实现4.1 LM35与ADS1115驱动4.2 Web服务器显示LM35传感器数据本文将介绍有关如何在ESP32的Web服务器中显示LM35 温度传感器数据。 1、LM35介绍
LM35 用于测量物体或…

【杂谈】-蓝牙低功耗数据传输模式比较
蓝牙低功耗数据传输模式比较 文章目录 蓝牙低功耗数据传输模式比较1、无连接数据传输2、无连接数据传输的优点3、无连接数据传输的局限性 3、面向连接的数据传输4、面向连接模式的优点5、面向连接模式的局限性6、家庭自动化项目的性能观察 物联网(IoT)设…

【论文学习笔记】VibroScale: Turning Your Smartphone into a Weighing Scale
http://users.eecs.northwestern.edu/~szh702/paper/vibroscale.pdf
1. 介绍
(1) 现代智能手机配备了数个传感器,可以支持各种类型的测量。文中重点关注加速度计和振动马达。Vabroscale控制智能手机的振动马达,并使用智能手机内…

ESP32设备驱动-振动电机模块驱动
振动电机模块驱动 文章目录 振动电机模块驱动1、振动电机介绍2、硬件准备3、软件准备4、驱动实现1、振动电机介绍
振动电机是用于产生振动的机械装置。 振动的产生是在驱动轴上质量不均匀的电动机的支持下发生的。 它是一种微型直流电机,通过振动让用户知道声音。 在此必须注…
ESP32设备驱动-定时器与定时器中断
定时器与定时器中断 文章目录 定时器与定时器中断1、ESP32定时器介绍2、定时器相关API介绍3、软件准备4、硬件准备3、代码实现有时需要按时发生某些事情,这就是计时器和计时器中断发挥作用的地方。 定时器是一种中断。 它就像一个简单的时钟,用于测量和控制时间事件,提供精确…

博世BMI160六轴传感器I2C通信配置
博世BMI160简介 Bosch Sensortec公司推出的最新BMI160惯性测量单元将最顶尖的16位3轴重力加速度计和超低功耗3轴陀螺仪集成于单一封装。采用14管脚LGA封装,尺寸为2.53.00.8mm3。当加速度计和陀螺仪在全速模式下运行时,耗电典型值低至950A,仅为…
![[硬件基础]-快速了解触发器](https://img-blog.csdnimg.cn/54635c0966b849f9857bb34d9f436a3e.webp#pic_center)
[硬件基础]-快速了解触发器
快速了解触发器 文章目录 快速了解触发器1、触发器概述2、触发器和锁存电路之间的区别3、触发器的类型3.1 SR触发器3.2 D触发器3.3 JK触发器3.4 SR触发器和JK触发器的区别3.5 T触发器 触发器是制造存储器件和数字逻辑电路的最重要主题之一。 在本文中,我将讨论触发器…
ESP32设备驱动-RDM6300 RFID读写器驱动
RDM6300 RFID读写器驱动 文章目录 RDM6300 RFID读写器驱动1、RDM6300 射频识别读写器介绍2、硬件准备3、软件准备4、驱动实现在本文中,我们将介绍如何将 RFID 阅读器 RDM6300 或 RDM630 与 ESP32 开发板连接。 这两种 RFID 阅读器都通过 UART 上的串行连接进行通信,并遵循与 …

宏集新闻 | 虹科传感器事业部正式更名为宏集科技
致一直支持“虹科传感器”的朋友们: 为进一步整合资源,给您带来更全面、更优质的服务,我们非常荣幸地宣布,虹科传感器事业部已正式更名为宏集科技。这一重要的改变代表了虹科持续发展进程中的新里程碑,也体现了我们在传…
ESP32网络开发实例-使用密码登录Web服务器
使用密码登录Web服务器 文章目录 使用密码登录Web服务器1、软件准备2、硬件准备3、代码实现在本文中,我们将使用 ESP32 和 Arduino IDE 设计一个受密码保护的 Web 服务器。 如果您使用 ESP32 制作了家庭自动化项目并且您正在访问 Web 服务器上的所有信息,并且您希望通过添加密…

ESP32设备驱动-MAX30102脉搏血氧饱和度和心率监测传感器驱动
MAX30102脉搏血氧饱和度和心率监测传感器驱动 文章目录 MAX30102脉搏血氧饱和度和心率监测传感器驱动1、MAX30102介绍2、硬件准备3、软件准备4、驱动实现1、MAX30102介绍
MAX30102是一款集成脉搏血氧饱和度和心率监测生物传感器模块。 它包括内部 LED、光电探测器、光学元件和…

ESP32设备驱动-CCS811数字气体空气质量传感器驱动
CCS811数字气体空气质量传感器驱动 文章目录 CCS811数字气体空气质量传感器驱动1、CCS811介绍2、硬件准备3、软件准备4、驱动实现1、CCS811介绍
CCS811 是一种低功耗数字气体传感器解决方案,它集成了用于检测通常在室内发现的低水平 VOC 的气体传感器解决方案、微控制器单元 …
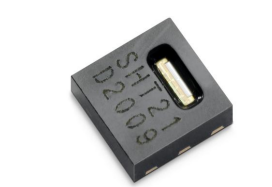
#芯片# SHT21温湿度传感器的使用
1. 背景
工作中,需要使用到SHT21温湿度传感器。相关手册:SHT21 由于焊接的问题,部分芯片存在通信异常初始化失败的问题。因而在代码中采用了极端的异常处理。(不断复位初始化)
1.1 芯片简易资料
SHT21 湿度和温…

规范停车,东城区新增近一千个路侧泊位
随着技术的发展,基于物联网的路程停车系统越来越普及,现在全国各地觉有路侧停车位,在相当大的地区已经实行收费,采用互联网收费人工收费等多种收费方式,路侧停车收费系统越来越普及,技术也越来越完善。 为贯…
情感计算,最复杂的数据运算|Mixlsb交叉学科
本期闪聊关键词:情感计算 情感触摸 社群所有成员在进群之前,就已经备注了各自的信息。活跃的自然能轻易获得社群流量和资源,但也有潜伏的。工作人员偶尔会翻看群成员们的资料,有些适合串联合作,有些适合分享ÿ…